ich beschäftige mich gerade mit der Rollosteuerung für unseren Neubau. Zuerst wollte ich dies mit Homematic machen. Da ich aber schon die gesamte Licht und Heizung nun über Pokey / Poblocks mache, wollte ich nun auch die Rollosteuerung damit durchführen.
Leider musste ich feststellen, dass die Programmierung dafür gar nicht so einfach ist. Besonders, weil ich jedes Rollo nur mit einem Taster steuern möchte.
Hat dies jemand schon mal gemacht, nicht unbedingt mit Pokey, vielleicht mit einem ATMEL oder ähnliches?
Wichtig ist natürlich die Kommunikation mit IP-Symcon.
Rolladen und Verstellamellen sind iM in, in Potblock
Es hat schon Komfort, wenn man Pokey mit einem Befehl dazu bringen kann den Rolladen oder Verstellamellen zB in 50% Stellung zu bringen.
Dazu muß man die Gesamtfahrzeit ermitteln und mit der aktuellen Fahrzeit vergleichen.
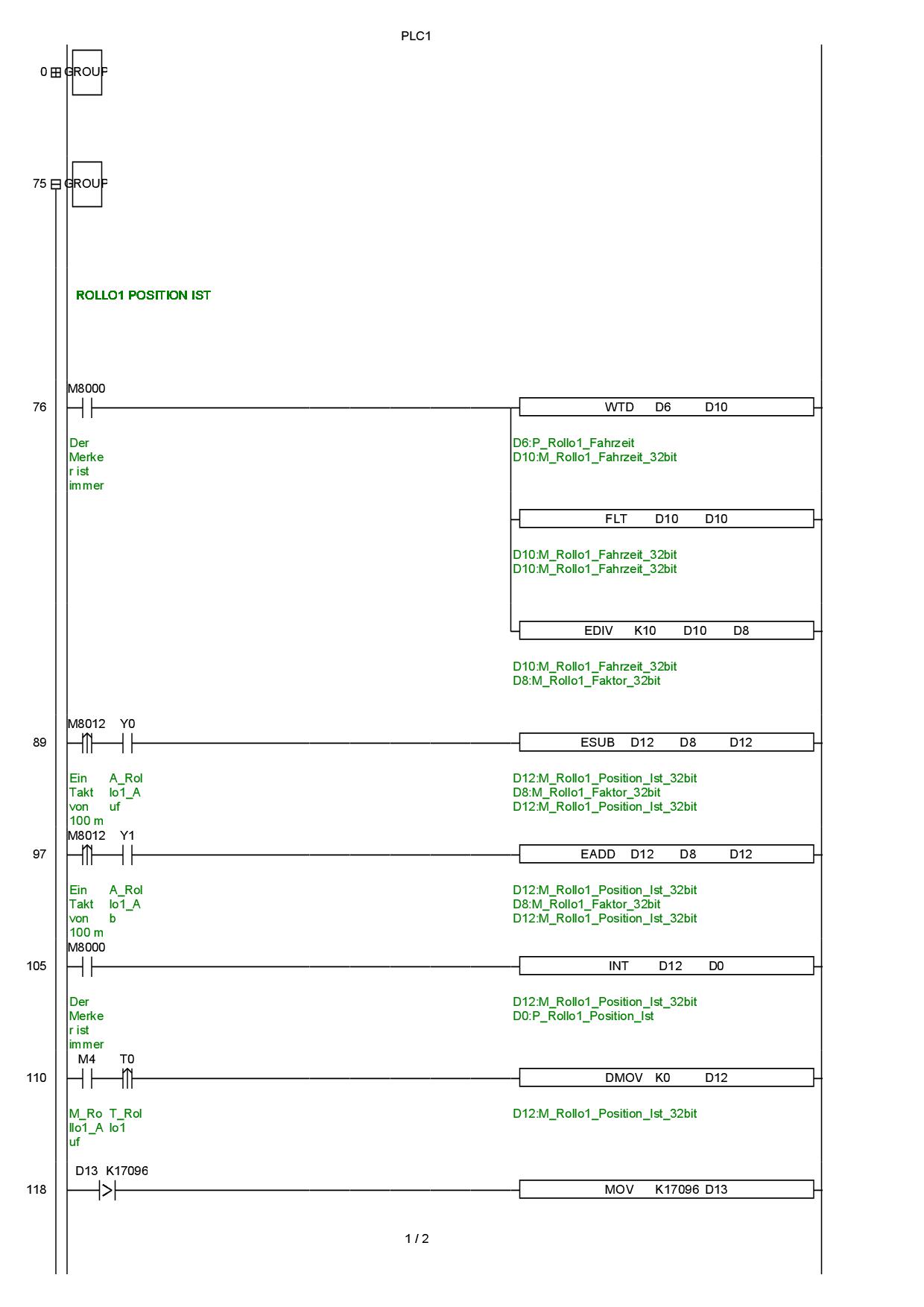
Einen Ansatz biete ich hier mit der Ermittlung der Fahrzeit:
Ist nur Simuliert mit einem Timer.
Hier steuert IPS den Rolladen auf 100%, zur 50% Anfahrt muß man nur den Wert von 0>> durch 2 teilen und den Wert dann zur Referenz für 50% nutzen:
Wird Kontaktplan sein, hilft nicht wirklich, aber interessant wäre für mich die Erkennung wo der Ro-Laden steht oder wie die Touchbedienung aufgebaut ist.
Auf der Seite von Lars ist ein Arduinio mit Modbus.
Jap alles in KOP. Habe sowas aber auch für die Wago in CFC geschrieben…
Also die Position errechne ich:
->Eingabe der Laufzeit in Sekunden über das Touch
->Mit dem 100ms Takt der CPU Zähle ich eine Variable hoch wenn das Rollo hochfährt und runter wenn das Rollo runterfährt.
->Aus der Zeit und dem Takt errechne ich den Stand von 0-100%.
Ich kann kann ja morgen mal die Passenden stellen posten.
Also den Modbus Client habe ich an meinem Aquarium hängen…Der wird vom IPS eingelesen funktioniert ganz gut…bis auf den 1-Wire der scheint es nicht zu mögen wenn ich meine LED per PWM Dimme.
Das Display mit dem Touch habe ich für einen Licht Aquarium Sterunung verwendent…
Die Stellungen der Rollos schreibe ich nicht ins ROM. Nur die Zeiten der Rolles und die Zeitschaltuhr.
Wenn mal der Strom wech ist muss man einmal alle Rollos nach oben fahren damit man wieder auf „0“ ist.
Ja hab ein Arduino Board am Aquarium, es ist ein TCP Modbus Slave mit Relais, Analog In, 1-Wire und PWM Out.
Die Idee mit dem Infoterminal ist echt gut!! Es gibt ja auch 1,8Zoll Display’s mit Touch…Aber wenn man von den Abmassen klein bleiben will bekommt man da wohl kein ModbusTCP rein…
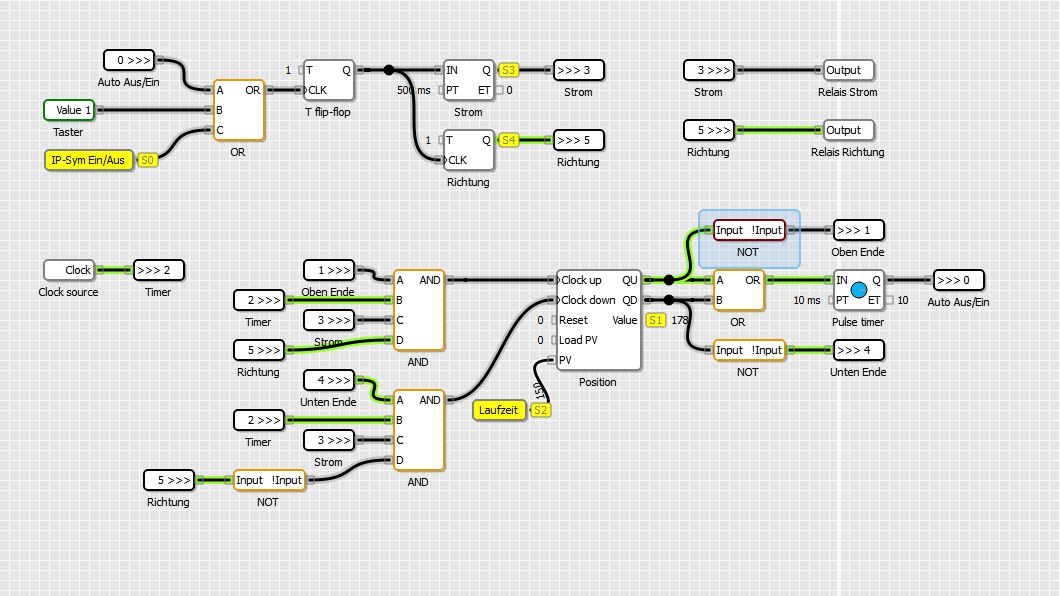
Habe nun mal was in PoBlocks erstellt.
Ein paar Info´s dazu. Über ein Taster wird die Rollosteuerung durchgeführt. Nach dem Initialisieren wird das Rollo einmal bis nach oben gefahren um den Positionszähler korrekt zu setzen
Tasterfunktion: 1* Drücken, Rollo fährt in die angegebene Richtung bis Ende oder bis Taster wieder gedrückt wird. Nochmal drücken, Rollo fährt in die andere Richtung.
Relais: 1für Richtung, 1 für Strom, somit sind diese auch gegeneinander verriegelt. Das Richtungsrelais wird immer vor dem Stromrelais geschaltet. Hierbei wird auch die Wartezeit des Rollomotors eingehalten.
Die Laufzeit kann eingetragen werden oder per IP-Symcon übergeben werden. Die Position wird ebenfalls an IP-Symcon übergeben. Weiterhin kann das Rollo auch per Symcon gestartet werden.
Was fehlt noch: Eine Position per IP-Symcon an den Pokey übergeben, aber die nächste Nacht kommt ja
Wer Optimierungvorschläge hat, immer her damit. Ich muss nämlich 15 Rollos ansteuern und die jetzige Schaltung belegt bereits 13% Speicher für 1 Rollo.
auch 100ms, also im Timerobjekt eine 50 eingetragen
Bin gerade am überlegen ob ich die 15 Rollos nicht mit dem Multiplexer hinbekomme, leider haben die keinen Demultiplexer an Board den bräuchte ich um die Ausgänge umschalten zu können.