angepasst habe, habe ich allerdings immer noch das Problem, dass zu dem MQTT von IP-Symcon keine Verbindung aufgebaut wird.
Es wird nichts gesendet bzw. es kommt nichts bei IP-Symcon an. Eventuell hat du eine Idee, was ich zusätzlich noch machen muss, um die Verbindung zum MQTT herzustellen.
ich verwende einen externen Broker, nicht den von IPS. Aber bist du dir sicher,
dass der Broker vom IPS auf 1883 läuft? Bei mir läuft der auf 1024 ( kann aber auch sein ich hab das geändert ) und die IP
muss meiner Meinung nach auch die vom IPS Rechner sein oder hast du so ein IP Netz wie in der Konfiguration Datei?
ach ja und wenn du das aktiviert hast musst du entweder den Roboter neu starten oder den Dienst.
vielen Dank, aber das stimmt leider alles. Die IP ist tatsächlich IPS und der Port ist auch richtig. Den Dienst neu zu starten war auch mein erster Ansatz, danach der Reboot und jetzt wird es wohl das zurücksetzen des Saugroboters werden.
Ich habe eine Sophos UTM im Netz und kann mir im Augenblick nur der Tatsache sicher sein, dass der Roboter nichts an den MQTT sendet. Die Firewallregeln für den Cleaner und IPS sind auch in Ordnung.
Hier habe ich nur die schon vorhandenen Regeln für Cleaner und IPS um die MQTT Regeln erweitern. Bisher habe ich nur das Modul genutzt, was sehr gut funktioniert, nur leider eben ohne Karte …
Ich werde morgen den Saugroboter auf den Werkszustand zurücksetzen und dann noch einmal von vorne beginnen. Augenscheinlich liegt das Problem am Cleaner, den Rest meine ich ausschließen zu können …
hast du denn schon einmal ein MQTT Programm genutzt um den Traffic zu checken. Ich nutze MQTT.fx auf dem MAC,
aber da gibts sicher Windows Programme. Ich hab zwar auch eine Sophos, arbeite aber nicht mit verschiedenen IP Netzen
innerhalb des Hauses. Wie gesagt, ich nutze einen Broker, welcher auf dem gleichen Rechner wie Symcon läuft, da anfangs MQTT
nicht implementiert war. Ansonsten nochmals mit einem Diagnoseprogramm schauen, wo du einfach den Broker mit einem Scan
checkst, was überhaupt ankommt.
ich würde das gerne genauso einrichten, da ich ein Problem mit der Karten-Anbindung per MQTT an IPSymcon habe. Bei mir stürzt IPSymcon immer ab, wenn der Staubsauger saugt und dauernd die Karte per MQTT sendet.
Hast Du neben Node-RED Mosquito installiert, der die MQTT Messages von Valetudo empfängt?
Wie genau hast Du das Umwandeln der Karten MQTT Messages in eine PNG Datei gemacht? Welche Nodes muss ich dafür einbinden?
Warum geht denn der interne IPS MQTT Broker nicht? Ist das fixbar? Frage mich ob ich jetzt extra einen Broker aufsetze oder nicht besser warte bis der IPS-Broker damit funktioniert …
Vielleicht könnte Thomas die MQTT Messages von Valetudo mal direkt nach IPSymcon schicken und schauen, ob IPSymcon stabil bleibt, wenn der Staubsauger anfängt zu saugen?
wie leider vermutet sendet der Roboter nichts an den MQTT. Jedenfalls kann ich keinen Eingang von irgend etwas nach zwei Tagen feststellen. Ich werde jetzt den Roboter auf Werkszustand zurücksetzten …
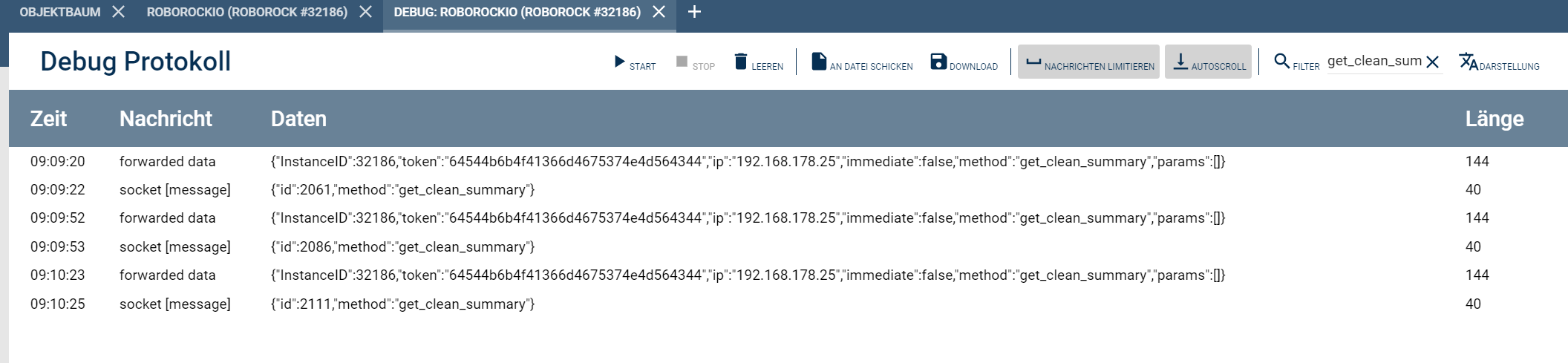
Kannst Du mal im IO des Roborock ein Debug Fenster öffnen und schauen was als Antwort auf get_clean_summary zurück kommt. Anscheinend unterscheidet sich das von den anderen Modellen.
Funktioniert denn irgendwas bei Dir? Ich kenne das genaue Modell was Du nutzt nicht, wäre aber dennoch verwundert wenn eine Ansteuerung funktionieren würde ohne die korrekte IP des Saugers und einen Token.
sorry, hatte echt viel um die Ohren. Habe mal getestet, MQTT auf den IPS internen MQTT Server zu schicken. Da kam auch was an, aber binnen Minuten hat es mir mein IPS komplett abgeschossen ( Crashprotokoll kann ich schicken ). Bei mir läuft IPS virtuell, kann also sein, dass die Performance der VM nicht ausgereicht hat. Der externe MQTT Server läuft auf der gleichen VM und dort
läuft es stabil.
Btw., vielleicht kann mir jemand einen Tip geben, wie ich z.b. über KS_MQTT folgenden Payload absetzen kann, da habe ich gar keinen Plan:
hab Dein Modul schon eine ganze Weile im Einsatz. Vielen Dank nochmal dafür.
Jetzt habe ich meinen Robo endlich mal gerootet.
Habe nun das Modul schon mehrfach deinstalliert und wieder neu installiert. Ich bekomme aber keine Karte bzw. Koordinaten angezeigt. Letztere ist angelegt, wurde aber noch nie Aktualisiert. Die Variable „Karte“ war vor meinen Änderungen da. Jetzt wird sie aber nicht mehr angelegt.
Mach ich was falsch?
17.12.2019 13:24:07 | PHP Error | Type: E_WARNING
Message: Objekt #57371 existiert nicht
File: C:\ProgramData\Symcon\modules\.store\fonzo.ipsymconroborock\Roborock IO\module.php
Line: 728
spontan würde ich sagen durch das Rooten wird die Karte intern anders abgelegt im Roboter und kann daher nicht
mehr aufgerufen werden bzw. wird nicht mehr übergeben. Gleiches Thema hatte ich auch, daher bin ich den Umweg
über MQTT und Node-Red gegangen.
naja, aber lt. Log will er ja was machen. Nur die Variable fehlt halt
und im io-debug:
17.12.2019, 14:00:09 | raw data | {„result“:[{„msg_ver“:8,„msg_seq“:223,„state“:5,„battery“:100,„clean_time“:40,„clean_area“:600000,„error_code“:0,„map_present“:1,„in_cleaning“:1,„fan_power“:86,„dnd_enabled“:0}],„id“:5216}