Dere 1S enstpricht aber eher dem S6 (ohne Wischfunktion) und hat in allem was ich bislang gesehen habe sehr gut abgeschnitten.
Wobei die Unterschiede S55 zu S6 ja eher marginal sind. Ich wüsste nicht, warum man upgraden sollte.
Gesendet von iPhone XS mit Tapatalk
spricht ja auch keiner von einem Upgrade, aber warum einen „schlechteren“ für „mehr“ kaufen
Wobei der S55 besser klettern kann, wie ich lese.
Egal, beides schöne Geräte. Bei uns wurde er direkt benamt und ist nicht mehr wegzudenken. Sogar unser Hund hat keine Probleme, wenn der fleißige Helfer herumsaugt.
Gesendet von iPad mit Tapatalk
Hallo
ich wollte mich nochmal melden. Seit dem das Modul auch im Store verfügbar ist, ist da scheinbar auch die inplementierung in Symcon anders. Die Scripte die man sonst noch im Symcon Modul Ordner anpassen kann werden da nicht mehr angezeigt.
Konkret besteht immer noch das Problem, dass hier die IO ca 4x pro Sekunde aufgerufen wird.
Ist das so gewollt. Mein System wird dabei ziemlich ausgelastet wenn der Roboter nur alle 2 Tage mal gestartet wird 
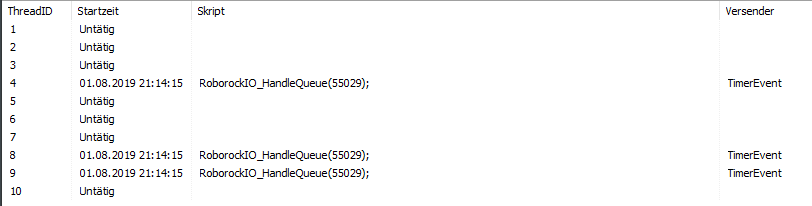
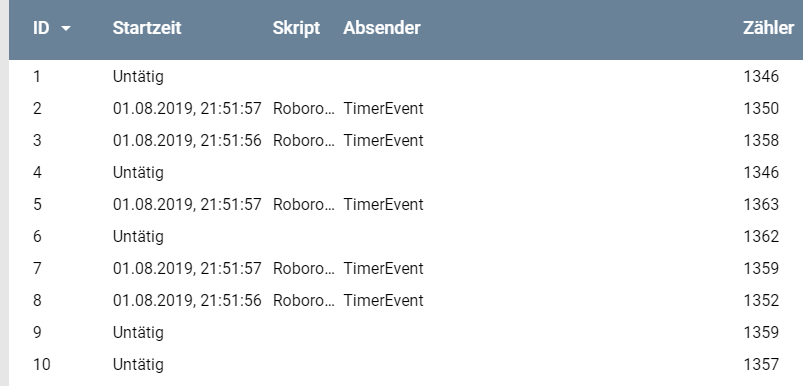
Ich denke dass der Timer programmiert ist. In einer früheren Version konnte ich hier noch 10000 rein schreiben, dann hat er alle 10 Sekunden nur mal aktualisiert.
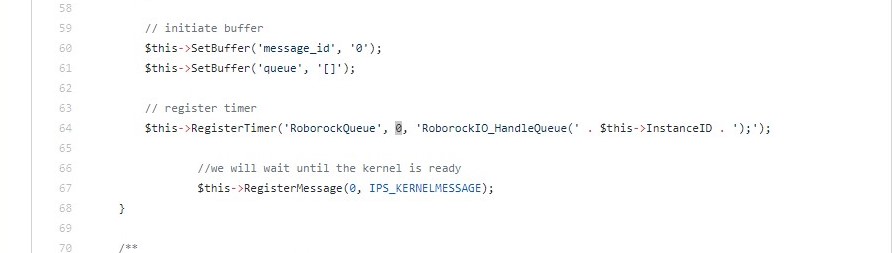
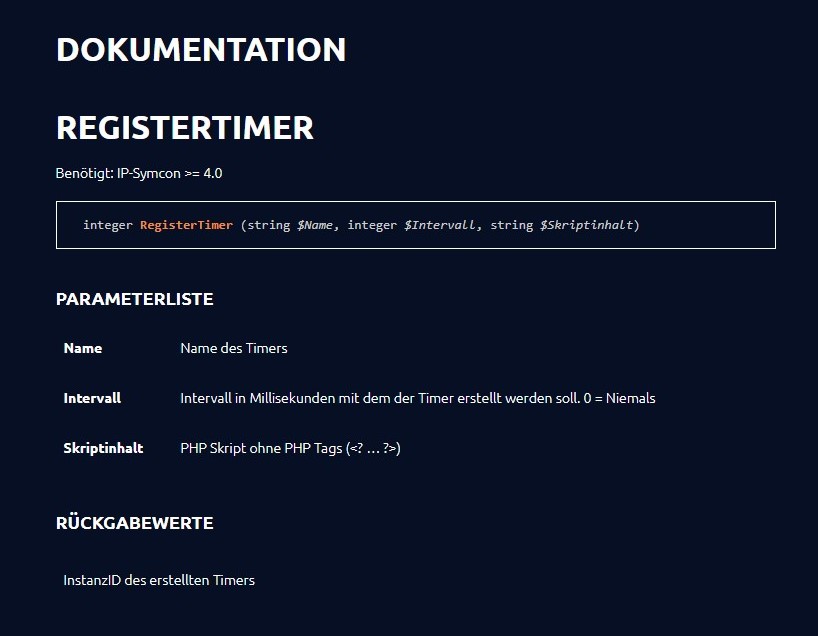
Komisch ist, dass laut Doku hier die 0 eigentlich für Niemals steht
Hab jetzt folgende Lösung:

Über die Variable wird die IO angelegt und gelöscht.
Wenn ich dem Robi einen Befehl geben will wird die Verbindung aufgebaut, anschließend die Daten gesendet. Nach 5 min wird die Verbindung wieder gelöscht. So kann ich ihn bei Bedarf steuern. Falls ein neuer Befehl geschickt wird, wird der Timer wieder zurück gesetzt. So ist sichergestellt, dass für jeden Roboter die Befehle raus gehen.
<?
$Value = getvalue (38291 /*[Hardware\XIAOMI Saugroboter\Steuerung aktiv]*/);
$guid = "{4743ED9C-720B-D5EA-9B0C-0585803284F3}";
$IDInfo = 38113 /*[Hardware\XIAOMI Saugroboter\Infomeldung]*/;
if ($Value == true){
// Anlegen und Verbinden
$new_id = IPS_CreateInstance($guid);
IPS_SetName($new_id, "Roborock I/O");
IPS_Sleep(1000);
IPS_ConnectInstance(39023, $new_id);
IPS_ConnectInstance(17777, $new_id);
IPS_SetScriptTimer(17635 /*[Hardware\XIAOMI Saugroboter\Steuerung aktiv\aktualisieren\zurücksetzen]*/, 0);
IPS_SetScriptTimer(17635 /*[Hardware\XIAOMI Saugroboter\Steuerung aktiv\aktualisieren\zurücksetzen]*/, 1 * 60);
//setvalue ($IDInfo, getvalue ($IDInfo) . "connect.
");
}else{
// Löschen
$id = IPS_GetInstanceIDByName( "Roborock I/O", 0);
IPS_DeleteInstance($id);
}
?>
bei mir funktioniert das Modul nicht mehr, bekomme diese Fehlermeldung:
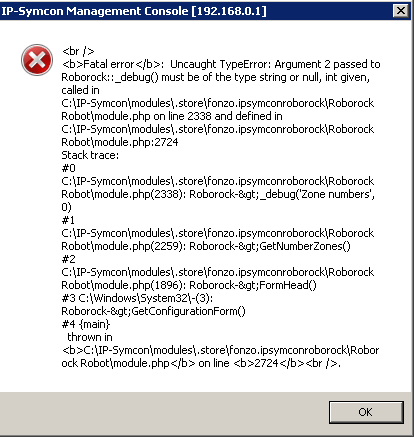
hab das Modul neu Installiert, hat aber nichts gebracht.
Eine neue Instanz kann ich anlegen jedoch fehlt mir jetzt der Token, wo wird der gespeichert?
kann ich den irgendwo auslesen (Datensicherung ist auch vorhanden) möchte mir das neue auslesen vom iPhone ersparen.
Wechsel mal kurzfristig auf den Beta Kanal bis die aktuelle Stable freigegeben wurde.
Funktioniert wieder, danke!
Wie kann man eigentlich in den Wisch-Modus wechseln? Und wie die verbrauchten Teile wechseln bzw. Angeben, das der Sensor gereinigt wurde?
Hallo, bist du hier weitergekommen? Ich habe auch alle 200ms die entsprechenden Threads, und die stören so langsam aber sicher die sonstigen Skripte (die immer mehr werden…)
Wo kann ich den Wert ändern?
Ich mache das jetzt so wie in meinem Post danach beschrieben habe.
Die IO wird nur kurz gestartet und mit den Robotern verbunden. dann werden die Daten aktualisiert und die IO wird wieder gelöscht. Auch nicht gerade edel, aber immer noch besser als die vielen Scripte.
Bekommst du dann trotzdem noch Aktualisierungen, wenn der Roboter in sein Dock gefahren ist? Oder vergisst IPS nach 5 Minuten dann, dass der Roboter rumfährt?
Den Status bekomme ich dann alle 5 min. D.h. wenn der Robbi in der Station steht weiß das Symcon im ungünstigsten Fall 5 min später.
Manchmal habe ich noch das Problem dass die IO Instanz schon vorhanden ist. Das passiert glaube ich nach einem Neustart des Systems. Dann wird die Instanz nochmal automatisch vom System abgelegt. Müsste man dann nochmal löschen. Oder ich schau Mal ob ich im Script noch etwas einbauen kann dass eine evtl zweite IO Instanz dann ebenfalls gelöscht wird.
Gesendet von meinem VOG-L29 mit Tapatalk
Hallo Fonzo,
es wäre doch schick, wenn du für das Thema einen Lösungsansatz einbauen könntest.
Die Notlösung mit der Deaktivierung nach Tommys Methode finde ich nicht sonderlich charmant.
Ich habe das Problem, das viele Scripte extrem zeitverzögert laufen bzw. überhaupt starten, seit ich das Roborock-Modul am Laufen habe. Sicher geht es anderen doch auch so?
Ich denke mal drüber nach was man da für eine passende Lösung einbauen kann.
Daumen hoch. Da ich zwei Robos abfrage is bei mir auch ziemlich dicht mit Skripten. Wo ich es dann merke, wenn ich die Home App starte und die HomeKit Lösung auch anfängt ne Menge Skripte loszuballern. Da ist der Raspberry ganz schön beschäftigt und bis in der Home App das aktualisieren beendet ist dauert es schonmal 20 Sekunden.
Ich habe jetzt nochmal eine Verbesserung vorgenommen:
Beim Neustart des IPS-Dienstes wird der Roborock IO automatisch wieder angelegt. Wenn ich dann die Aktualisierung gestartet habe wurde eine zweite IO angelegt und nach 1 Minute dann wieder gelöscht.
Allerdings wurde hier nur die vom Script angelegte IO gelöscht. Die die Symcon selbstständig angelegt hat blieb hingegen bestehen.
Daher jetzt folgender Code: (dieser löscht alle Roborock IOs
<?
$Value = getvalue (38291 /*[Hardware\XIAOMI Saugroboter\Steuerung aktiv]*/);
$guid = "{4743ED9C-720B-D5EA-9B0C-0585803284F3}";
$IDInfo = 38113 /*[Hardware\XIAOMI Saugroboter\Infomeldung]*/;
if ($Value == true){
// Anlegen und Verbinden
$new_id = IPS_CreateInstance($guid);
IPS_SetName($new_id, "Roborock I/O");
IPS_Sleep(1000);
IPS_ConnectInstance(39023 /*[Hardware\XIAOMI Saugroboter\Xiaomi Saugroboter Mitte - 5573555733664b5967476d73376f6a42]*/, $new_id);
IPS_ConnectInstance(17777 /*[Hardware\XIAOMI Saugroboter\Xiaomi Saugroboter Oben - 7131314d56724d7261534278326f6d59]*/, $new_id);
IPS_SetScriptTimer(17635 /*[Hardware\XIAOMI Saugroboter\Steuerung aktiv\aktualisieren\zurücksetzen]*/, 0);
IPS_SetScriptTimer(17635 /*[Hardware\XIAOMI Saugroboter\Steuerung aktiv\aktualisieren\zurücksetzen]*/, 1 * 60);
//setvalue ($IDInfo, getvalue ($IDInfo) . "connect.
");
}else{
// Löschen
$ListeInstances = IPS_GetInstanceListByModuleType(1);
foreach ($ListeInstances as $ID){
$Instance = IPS_GetInstance($ID);
$Name = $Instance['ModuleInfo']['ModuleName'];
if ($Name == "RoborockIO") {
IPS_DeleteInstance($ID);
}else{}
}
}
?>
Hat einer von euch schon den S6 im Einsatz? Nachdem mein S5 einen Defekt hatte und nicht zu reparieren ist, überlege ich, ob ich nun direkt auf den neuen umsteige. Steuerung durch IPS ist dabei aber natürlich auch ein wichtiges Kriterium. 
Der S6 scheint ja eine eigene App („Roborock“ für iOS) spendiert bekommen zu haben…
Danke im Voraus!
Hallo
Ich hab den S6 im Einsatz . Funktioniert einwandfrei mit dem Modul.
Gesendet von iPad mit Tapatalk