Hast ne PN.
Grüße,
Kai
Hast ne PN.
Grüße,
Kai
Hat noch jemand einen neuen Roboter? Jahr 2025+?
Grüße,
Kai
Hier habe ich einen Yuka1000 von 2025 mit Kehrmaschine.
SIM ist abgelaufen läuft aber mit RTK über WLAN.
Schick mir dazu per PN eine Mail-Adresse
Danke! PN ist raus.
Grüße,
Kai
Ich suche immer noch einen ganz aktuellen Roboter.
Falls noch jemand einen freigeben kann, bitte melden. ![]()
Grüße,
Kai
@paresy, hat mir einen Fix in Symcon erstellt und mir eine Testversion zukommen lassen, damit bekomme ich die Daten nun per MQTT in Symcon, somit sollte es mit dem Modul möglich sein. ![]()
Grüße,
Kai
Kleiner Zwischenstand:
Das ist echt nicht ohne. ![]()
Ich verstehe den Code selbst nicht wirklich. ![]()
Claude macht das aber echt gut. Ich sitze da zwar mittlerweile seit nen paar Tagen jeden Abend dran, aber es scheint zu funktionieren. ![]()
Ich kann mittlerweile die Aufgaben auslesen, ggf. auch starten, das werde ich testen sobald das Wetter wieder besser ist.
Hier hat sich der Claude Pro Plan wirklich gelohnt, wobei ich selbst da heute schon das Limit erreicht hatte.
Grüße,
Kai
servus zusammen.
brauchst du noch einen aktuellen roboter? ich hätte seit vorheriger woche einen Luba 3
lg
gerry
Das wäre richtig gut.
Grüße,
Kai
passt. pn ist raus. lg
HI,
ich habe einen Yuka Mini 600, bei Bedarf gebe ich ihn dir gerne frei
Es gibt einen weiteren Fortschritt:
Folgendes funktioniert aktuell mit dem Luba 2:
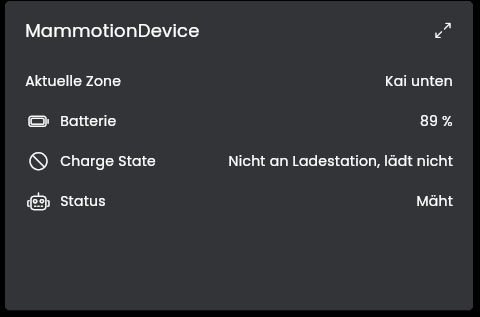
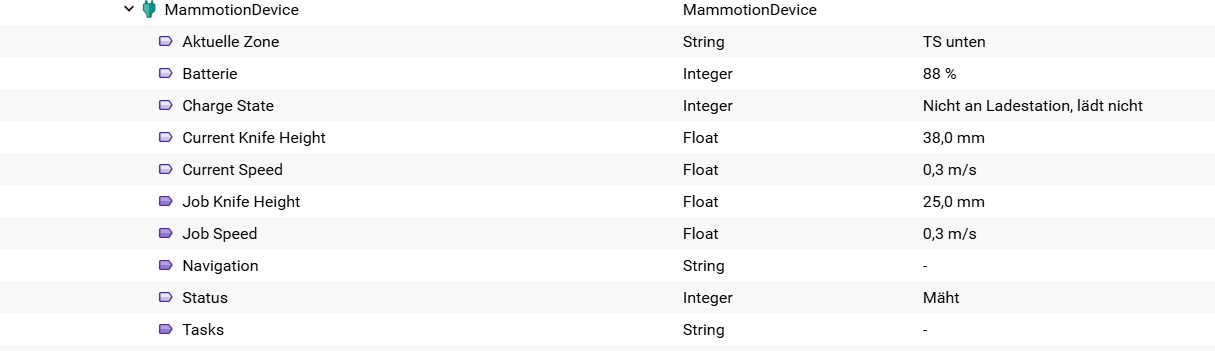
Folgende Werte werden ausgelesen:
Folgende Werte werden können gesetzt werden:
Das hat nun mittlerweile aber auch echt Tage gedauert. ![]()
Grüße,
Kai
Und noch was neues:
Grüße,
Kai
servus,
das schaut doch schon echt solide aus ![]()
lg gerry
Morgen!
Wie bzw. wo findet man das Modul?
mfg
maxx
Noch gar nicht.
Michael
Sobald @paresy eine neuen Beta Version mit dem Fix für MQTT online hat, werde ich es als Testversion online stellen.
Grüße,
Kai
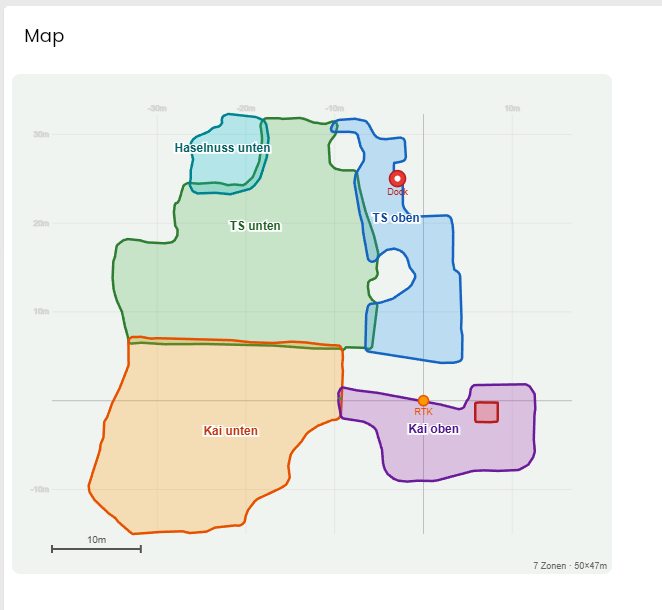
Die Namen, Dock und RTK werden nun korrekt angezeigt:
Mit dem Dock müsste man dann später mal testen, ob dies bei allen korrekt angezeigt wird.
Grüße,
Kai
Sieht ja schon sehr gut aus, schon mal danke für die Arbeit!
Kommst du auch an den Kamera Stream vom yuka?