Dann habe ich ja noch Hoffnung. Mei Sauger ist am 2.12. versendet worden. (shipped Out).
Dann hoffe ich das die Kommunikation beider Modelle gleich ist, damit auch die Besitzer der ersten Version was von einem eventuellen Modul haben.
Gruß Kay
Ich bekomme das 1. Modell.
evtl. kann ich dann helfen sollte die Lieferung ankommen.
Das kann ich nicht prüfen, das wird man dann sehen, ich gehe aber mal davon aus, das sich da jetzt nicht alles grundlegend geändert hat, sondern eben höchstens noch Funktionen hin zugekommen sind.
Wer sich an einer lustigen Google Translate Übersetzung versuchen will oder vielleicht sogar Chinesisch als Fremdsprache kann hier ist die Original Anleitung des Kehrroboters
Vielleicht hat ja jemand mal Lust in ein paar Stunden zwischen den Feiertagen spaßige Google Translate Übersetzungen zu machen ;).
Hallo zusammen,
ich warte auch noch drauf, dass es die 2. Generation ein bisschen günstiger gibt. Es gibt auch immer wieder Rabattcodes / Coupons auf irgendwelchen Sparfuchs-Seiten die den Preis dann noch ein bisschen reduzieren. Falls jemand also noch ein paar Euro sparen will erst mal ein bisschen nach im Web suchen.
Bisher habe ich auch nur Gutes von der Marke gehört.
Mal sehen wie lange ich es noch aushalte 
Viele Grüsse
Chris
SO, nach 35 Tagen ist heute mein Sauger geliefert worden. Werde ihn jetzt mal installieren und testen.
@Fonzo
wie bist Du mit deinem zufrieden bisher ?
evtl. kann ich dann auch ein paar Daten liefern (1.Gen.), falls benötigt.
Ich konnte ihn noch nicht intensiv testen, insbesondere die Wischfunktion habe ich noch nicht probiert, dies werde ich noch nachholen, eventuell komme ich am Wochenende auch dazu mir das mit dem Modul mal näher anzuschauen. Das Hauptproblem was ich zur Zeit sehe, ist der kleine Auffangbehälter des Roboters. Wir haben einen vierbeinigen haarigen Freund im Haus, damit ich nicht ständig selber saugen muss wäre das der Job vom Roboter. Ich fürchte nur, wenn unser haariger Freund mal wieder in massen Haare lässt, ist der Roboter da absolut mit überfordert bzw. das Fach ist voll, bevor dieser ein Stockwerk durchgesaugt hat. Ich werde das mal beobachten, vielleicht reicht das ja aus, wenn das Ding täglich einmal durchsaugt, so oft habe ich den bisher aber noch nicht saugen lassen und auch noch nicht regelmäßig.
Ja da komme ich gegenenfalls darauf zurück.
Kurzer Zwischenstand, ich habe inzwischen ein Modulgrundgerüst. Was noch fehlt ist die Verschlüsselung der Kommunikation, die muss ich noch bauen, mal sehen wie lange das noch dauert. Zur Zeit habe ich das mal mit einem Python Skript ausprobiert, darüber lässt sich mein Modell sauber steuren. Die gute Nachricht ist also, es dürfte keinen Unterschied in der Ansteuerung zwischen dem aktuellen Modell und dem alten Modell geben, wobei das mit 100% Gewissheit natürlich erst gesagt werden kann, wenn die Kommunikation so weit steht und jemand das dann auch mit einem alten Modell testen konnte. Was ich persönlich sehr umständlich finde, ist die Gewinnung des Tokens, hier habe ich auch keine anderen Quellen gefunden, als diesen direkt aus der App auszulesen, bei einem iPhone z.B. aus einem Backup. Wer da zufällig eine bessere Möglichkeit kennt, bin ich für Vorschläge offen.
Teste gerne, hab heute meinen 2ten bekommen
Sobald es was zum Testen gibt gebe ich Bescheid.
So sieht zur Zeit der Webfront im Entwurf aus.
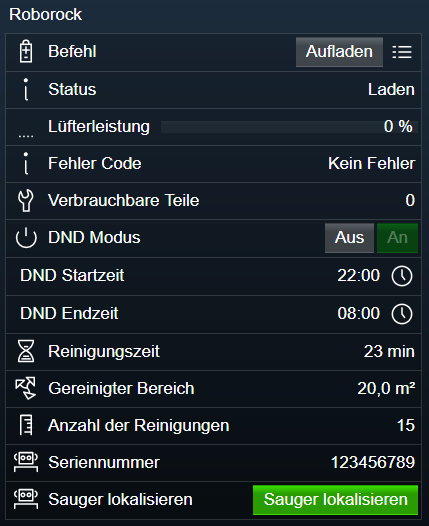
Soll da noch was an Infos dazu, fehlt da was bzw. was soll im Webfront alles sichtbar sein?
Genial. Ich wäre damit sehr zufrieden.
Sieht sehr gut aus.
Liese sich die Karte die der Sauger erstellt irgendwie darstellen ?? . Muss nicht in Echtzeit sein.
Danke für deine Arbeit -
Oliver
Das würde ich ganz zu letzt schauen. Grundsätzlich lässt sich Karte wohl auslesen, diese ist gezippt und eine Mischung aus Graustufen Bild und den Bewegungsdaten. Es gibt auch Ansätzte das zu entschlüsseln und darzustellen RRDraw.java. Selber würde ich aber keine Zeit darauf verwenden zu schauen wie man das darstellen kann, wenn es aber bei den Ansätzen das Map File sauber auszulesen Fortschritte geben sollte, kann man das dann später noch einbauen. Leider ist das nicht einfach ein png oder jpeg sondern ein eigenständiges Datenformat, das macht das Ganze nicht so einfach.
Was ich noch genial fände, wäre die remote control Steuerung per Script. Damit könnte man den Sauger gezielt in einen Raum fahren und dort dann die Reinigung starten.
Gruß Kay
Grundsätzlich geht das, nur wie man das so macht das es auch zu bedienen ist bin ich am überlegen. Man übergibt dem Roborock die Zeit und den Winkel den er fahren soll. Damit jetzt aber gezielt einen Raum anzufahren halte ich für schwierig, da man dann ja genau wissen müsste wie lange der Roborock in eine bestimmte Richtung fahren müsste. Aber wenn da Ideen bestehen wie man das sinnvoll nutzen kann bin ich offen. Methoden zum starten und stoppen der Remote Steuerung sowie eine Methode um Zeit und Fahrtrichtung vorzugeben werden auf alle Fälle verfügbar sein, wie man die dann nutzt muss man sehen.
Das mit der Fernsteuerung hatte ich mir auch schon überlegt. Meine Idee war so eine art Macrofunktion. Also man fahrt den Weg einmal per z.B. APP und zeichnet alle Bewegungen auf. Dieses „Macro“ müsste man dann einfach wiederholt ausführen um weider an die gleiche Stelle zu kommen.
Keine Ahnung ob das umsetzbar ist .
…das wäre für mich alles so lange unwichtig („schmückendes Beiwerk“), bis das mit dem Token geklärt ist, oder ist das inzwischen geklärt?
Joachim
Den Token kann man nicht automatisch aus IP-Symcon auslesen, zumindest habe ich dazu noch keinen Ansatz gefunden. Zur Zeit wäre es daher notwendig den Token z.B. aus einem unverschlüsselten iPhone Backup mit kostenloser Zusatzsoftware auszulesen bzw. bei Android auch mit zusätzlicher Software. Das ist glücklicherweise eine einmalige Sache. Wichtig ist die Verschlüsselung so zu bauen das dies auch mit PHP 7 funktioniert, da bin ich noch am schauen.