Ich hab schon herumgesucht (auch in fernen Landen) aber nichts gefunden. Gibt’s sowas nicht?
Es gibt den Erschütterungssensor, zB. von Aquara (Aqara DJT11LM control via MQTT | Zigbee2MQTT) welcher auch die X,Y;Z Achse anzeigt!
Gruß HEiko
1 „Gefällt mir“
Ist nach meinen Erfahrungen aber eher ein Schätzeisen.
Das stimmt leider ![]() Könnte mir aber vorstellen das es z.B. bei einem Garagentor funktioniert?!
Könnte mir aber vorstellen das es z.B. bei einem Garagentor funktioniert?!
Genau dafür, fürs Garagentor. Ich werde mit den Fenstersensoren (zwei Stück) nicht glücklich. Jetzt wollte ich mal das probieren. Und da brauche ich im Grunde nur 3 Werte. Geschlossen (senkrecht mehr oder weniger), offen (weder senkrecht noch waagerecht) und Geöffnet (waagerecht). Das sollte sich schätzen lassen.
Garagentor sollte klappen. Für Dachflächenfenster war er bei mir zu ungenau.
joah, geht so, der eine läuft noch, der andere hat seit 4 Wochen eine leere Batterie, die hat nicht mal 2 Monate gehalten.
Vibration bzw. Neigung funktioniert schnell und gut, die Grad-Werte springen stark, wenn das Tor fährt.
Vielleicht wackelt es mehr hoch als es fährt ![]()
1 „Gefällt mir“
Moin,
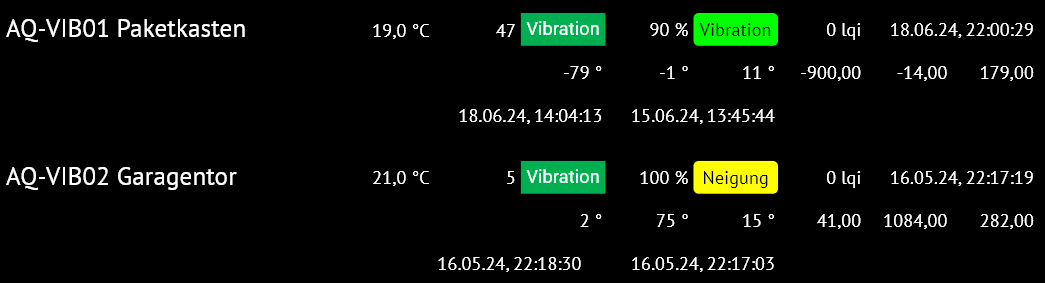
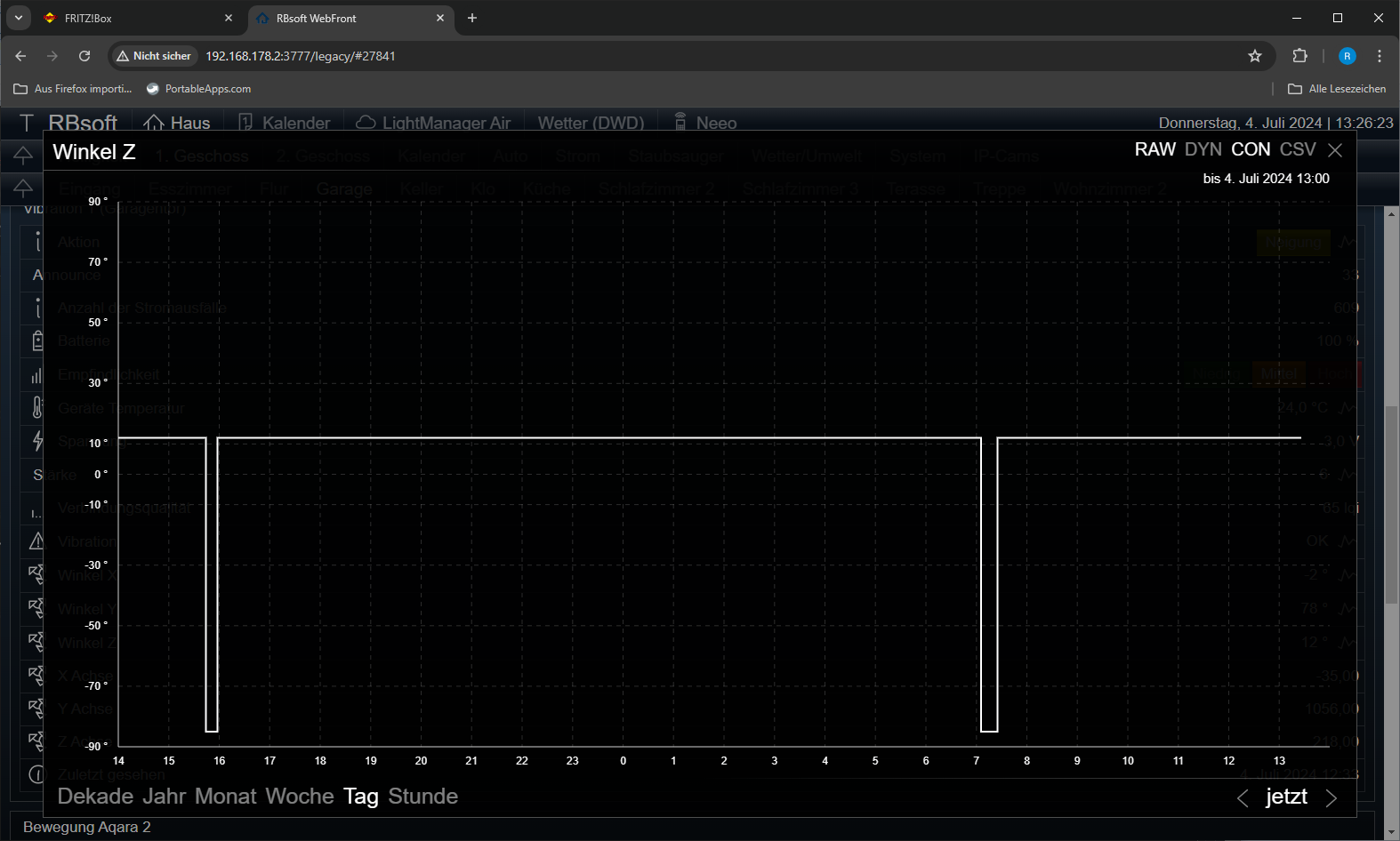
der Vibrationssensor kann Winkel angeben hat aber eine geringe Frequenz, d.h. das Objekt muss eine Weile ruhig stehen damit ein Wert kommt. Hier ein Bild der Messung bei meiner Garage.
Beim Briefkasten benutze ich ihn auch da aber nicht die Winkel.
Ralf
Der Sensor ist da und eingebunden.
Was bedueten die Werte
- Ausrichtung (diese ändern sich bei Bewegung)
- Erschütterungswinkel (ändert sich auch)
Welche Werte kann die Empfindlichkeit annehmen?
Und wie interpretiere ich die Ausrichtung? Sind das die x, y und z Achsen?

Moin,
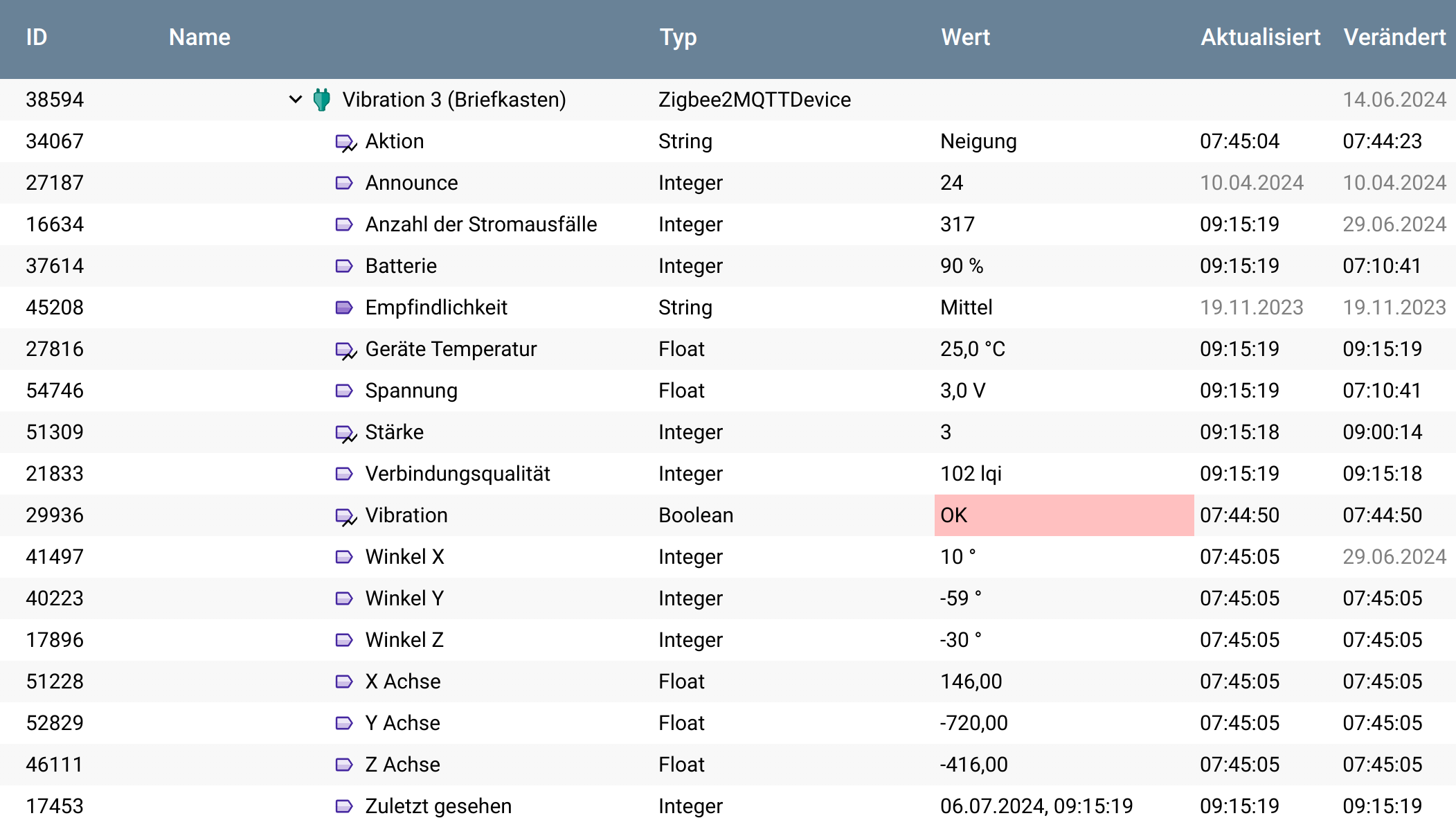
anscheinend wurde der Sensor in den letzten 3-4 Jahren deutlich geändert. Meiner liefert diese Werte:
Ist deiner ein Aqara DJT11LM?
Ralf
Ja. Verbunden mit DeconZ.
Ich denke in Deconz wird da herumgerechnet. Habe diese Formel gefunden
/* global Attr, R */
const x = Attr.val << 16 >> 16
const y = Attr.val >> 16
const z = (Attr.val / 0x10000) >> 16
R.item('state/orientation_x').val = Math.round(Math.atan(x / Math.sqrt(z * z + y * y)) * 180 / Math.PI)
R.item('state/orientation_y').val = Math.round(Math.atan(y / Math.sqrt(x * x + z * z)) * 180 / Math.PI)
R.item('state/orientation_z').val = Math.round(Math.atan(z / Math.sqrt(x * x + y * y)) * 180 / Math.PI)
Wenn ich das richtig interpretiere, dann sind in dem String „Ausrichtung“ die drei Werte für x,y und z enthalten.
Ah, wichtiger Hinweis: Aqara Vibration Sensor DJT11LM - deCONZ REST-API