Nein,
dieses :
RS 630 Modell 2014 - Gebrochener Fahrmotor Getriebe Mitnehmer - Seite 2
Der RS ist anders aufgebaut.
Hallo Piet,
ich kenne den RM400 nicht; der RJ11 für die serielle Schnittstelle ist dort offenbar nur als Service Connector vorgesehen, nicht - wie beim RC - für ein Zusatzmodul. Deshalb ist am RJ11 auch kein +12V zu messen
Deine Messung zeigt nur 0V; das passt gut, weil TX und RX normalerweise inaktiv sind.
Es könnte sein, daß hier die gleiche Steckerbelegung gewählt wurde:
Unitronics PLC - RJ11 serial port for RS232 and RS485
Grüße,
Roland.
Hallo zusammen!
Ich hab Gestern meinen Robomow RS615 mit GSM Modul bekommen und hab mir mal auf die schnelle angesehen was bzgl. Anbindung zu Symcon geht.
Vorweg, wie ich finde ist die ganze Software von Robomow eine Sicherheitstechnische Katastrophe.
Das Ding hat eine RS232 Schnittstelle, Bluetooth und ein GSM Modul.
Der „Sicherheits“ PIN ist für den Ar… 
Ich kann den PIN über die RS232 auslesen und auch schreiben. Ihm ist auch egal ob ich ihn vorher eingebe oder nicht.
Außerdem können, so wie ich das bis jetzt sehe, alle Daten per RS232 geändert werden.
Mit Bluetooth hab ich mich noch nicht beschäftigt, wird aber wohl das gleiche Protokoll wie über RS232 sein.
Das GSM Modul ist standardmäßig aktiv und verbindet sich zu einen Windows Server (app.robomow.com) dort lauft vermutlich auch die Webseite die an den IOs / Android Apps ausgeliefert wird.
Die Seite kann man auch per Browser abrufen.
Es gibt wohl auch einen Admin bzw. einen Servicetechniker Login.
http://app.robomow.com/admin
Und die Loginseite für die Servicetechniker
http://dist.robomow.com/
Der Mäher verbindet sich zum Server und schickt:
/RobotService.asmx/PushNotification Robot=IrgendeineID12345&SimID=SimID12345&MsgID=1&UserMsgID=3&Code=109
Leider bin ich damit noch nicht weitergekommen.
Aber man kann die Verbindung recht einfach auf seinen eigenen Webserver umleiten. Leider nicht über die Software, da diese Optionen deaktiviert sind. Aber über RS232 kein Problem:
[ol]
[li]Zum schreiben den „GO“ Knopf am Robomow drücken bis dieser neu startet.[/li][li]Dann das Script ausführen.[/li][/ol]
<?
$ID = 34516 /*[Serial Port]*/; //Instances ID des COM-Ports
$StartChar = 0xAA;
$DelimiterHeader = 0x1E;
$DelimiterMsg = 0xFE;
$ChkSum = null;
$SerialSendString = null;
// Message Types
//0x17 GSM Zeugs?
$MsgType = 0x17;
$SubMsgType = 0x19; //http server
$StrMailserver = "app.robomow.com"; //<-dein Server
$ArrayMailserver = str_split($StrMailserver);
//print_r ($ArrayMailserver);
//echo sizeof($ArrayMailserver);
//print sizeof($ArrayMailserver);
$ByteCount = 11 + sizeof($ArrayMailserver);
$ArraySerialData=array(0xAA); //Startzeichen
array_push($ArraySerialData,$ByteCount); //ByteCount
array_push($ArraySerialData,$DelimiterHeader); //Delimiter Header 0x1E
array_push($ArraySerialData,$MsgType); //Msg Type
array_push($ArraySerialData,0x00); //0x00
array_push($ArraySerialData,0x00); //0x00
array_push($ArraySerialData,0x00); //0x00
array_push($ArraySerialData,$SubMsgType);
array_push($ArraySerialData,$DelimiterMsg); //Delimiter SubMsg 0xFE
array_push($ArraySerialData,sizeof($ArrayMailserver)); //Count of SubMsg Bytes
foreach ($ArrayMailserver as $ArrayMailserverByte)
{
array_push($ArraySerialData,ord($ArrayMailserverByte));
}
//Checksummer erstellen
$SerialDataSum = array_sum($ArraySerialData);
$Teiler = (int)($SerialDataSum/255);
$Rest = $SerialDataSum % 255; //% = MOD
$ChkSum = (255 - $Rest) + $Teiler;
array_push($ArraySerialData,$ChkSum ); //Check Summe
foreach ($ArraySerialData as $ArraySerialDataInt)
{
$SerialSendString .= chr($ArraySerialDataInt);
}
print $SerialSendString;
ComPort_SendText($ID, $SerialSendString);
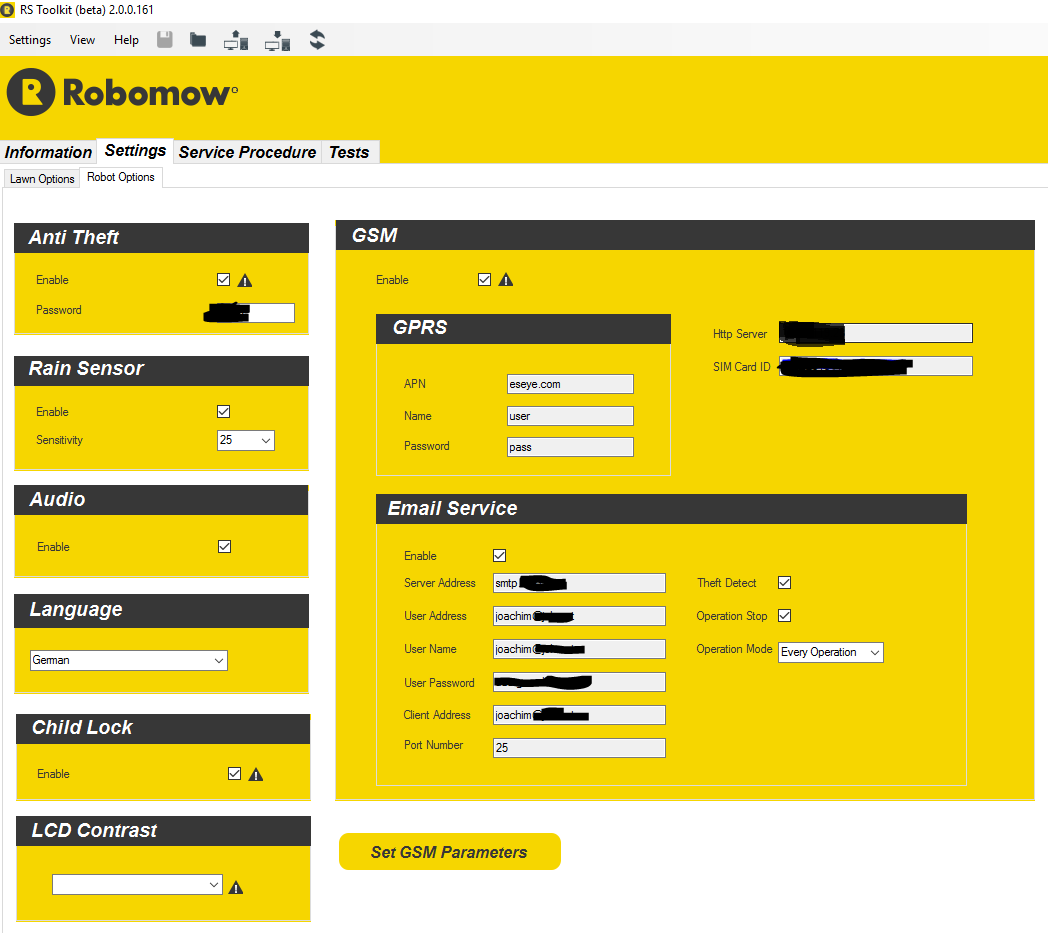
Das Robomow Toolkit gibt es übrigend direkt vom Hersteller 
sw.robomow.com - /software/PC Applications/Robomow Toolkit/Setup/
Damit sind auch Software/Firmware Updates möglich.
Mittels dem Robomow Windows Tools kann man sich auch die Werte ansehen und ggf. mit einem Serial Monitor mit schauen was dort gelesen/geschrieben wird.
Die Software ist eine oneclick Software (Vistual Studio) welche sich beim Starten immer zum Server verbindet und Updates zieht. Könnte mir also vorstellen das Robomow das bald mal abschalten wird. Also schnell laden und ggf. einen Hosteintrag machen um die Verbindung zu verhindern.
Ich bin gerade am sammeln welche Parameter es gibt und wie diese geschrieben werden.
In der Software (Robomow Toolkit) gibt es im Menu auch einen Punkt Tier1 2 und 3 wobei man für 2 und 3 ein Passwort benötigt. Wenn jemand herausfindet was das kann, bitte melden.
Danke an „Roland“ der mit seinem C# Programm schon einiges herausgefunden hat.
lg Joachim
Bei den „Tieren“ kann ich dir helfen, hatte ich mal gefunden…
Ich habe meinen RS heute wieder aus dem „Winterschlaf“ geholt, und nach dem Testlauf das Update verplättet, mal sehen.
Und ja, die Software von den Dingern ist nicht so prall, aber der RS macht gute Arbeit bei meinem Grundstück.
HI
Dort findet man PDF mit der Toolkit Beschreibung, leider in einer Sprache die ich nicht spreche, aber mit diversen Infos bzgl. Tier2
http://www.caahmro.fr/data/doc-357/20170120/2961_1.pdf
lg Joachim
Danke Joachim,
das gleich hast du gerade per Mail (in Sprache NL) bekommen, mit ein paar Bemerkungen von mir.
.
An alle Robomow und ips Besitzer, was genau wollt ihr alles mit einer Integration in IPS erreichen?
Bitte um Vorschläge?
Hallo Joachim,
ich würde gerne sehen ob er mäht, in Ladestation ist, oder sich festgefahren hat(was bei mir leider öfter passiert, da einige Plagegeister im Garten immer mal wieder so große Löcher buddeln, dass das Vorderrad stecken bleibt.
Im Moment erkenne ich einige Dinge an der Stromaufnahme der Powerbox, die hängt an einer zwave Steckdose mit Leistungsmessung. In IPS rechne ich die Daten um, und zeige mir so grob den Zustand an. (länger als 2,5 Std nicht in Ladestation = Roboter suchen gehen…)
Mein RS ist BJ 2015 aber erst letztes Jahr ende Mai gekauft, hat noch kein GSM Modul. Bluetooth Reichweite war immer grottenschlecht, habe aber das Gefühle beim kurztest am letzen WE, mit der neusten Firm ist es besser geworden, reicht aber nicht für eine Anbindung hier, da der Garten zu groß ist. Wenn muss ich da was an die RS232 per Funk dran hängen.
Das einzige gute an dem RS, er ist sehr robust vom Mähwerk und der Mähleistung. Regensensor kann man vergessen, funktionierte hier nicht gut (mal sehen wie es mit der neuen Firm ist).
ps und Danke für deine Info per Mail, werde ich mal am WE probieren.
Mit einem GSM Modul sehe ich zumindest die Möglichkeit bei Fehlern die Datenbank von Robomow abzufragen. Dort schickt der Robi Statusinformationen hin.
Darunter fallen diese Daten:
[Operation Id]
,[Operation Date]
,[Robot Serial Number]
,[Family Type]
,[Robot Model]
,[Software Version]
,[Software Version Test ID]
,[Mainboard Version]
,[Near Wire Enable Zone Main]
,[Near Wire Enable Zone A]
,[Near Wire Enable Zone B]
,[Operation Start Automatic]
,[Scan In Motion Enable]
,[Subzone Passage Enter Detect Enable]
,[Operation Halt Reason]
,[Charge Stage 1 Start Time]
,[Charge Stage 2 Start Time]
,[Charge Stage 3 Start Time]
,[Charge Battery Volt Max]
,[Operation Start Time]
,[Base Search Start Time]
,[Battery Cell Volt Imbalance]
,[Operation Stop Time]
,[Operation Eco Mode Stop Time]
,[Operation GoTo Base Reason]
,[Operation Stop Reason]
,[Base Depart Disable Reason]
,[Email ID]
,[Email Receive Date]
,[Email Retry Number]
,[Operation Cycle Index]
,[Time]
,[Operation Zone]
,[Charge Stage 1 Battery Capacity End]
,[Charge Stage 2 Battery Capacity End]
,[Charge Ambience Temperature]
,[Base Signal Detect Time]
,[Base Signal Detect Type]
,[Battery Capacity Reset Charge Cycle]
,[Battery Cell 1 Volt Operation GoTo Base]
,[Battery Cell 1-2 Volt Operation GoTo Base]
,[Battery Cell 1-3 Volt Operation GoTo Base]
,[Battery Cell 1-4 Volt Operation GoTo Base]
,[Battery Cell 1-5 Volt Operation GoTo Base]
,[Battery Cell 1-6 Volt Operation GoTo Base]
,[Battery Cell 1-7 Volt Operation GoTo Base]
,[Battery Cell 1-8 Volt Operation GoTo Base]
,[Scan Fwd Time]
,[Scan Bwd Time]
,[Scan Turn Time]
,[Scan Fwd Movement Count]
,[Scan Bwd Movement Count]
,[Scan Turn Movement Count]
,[GoTo Base Follow Wire Time]
,[Scan Time]
,[Drive Overcurrent Events]
,[Drive Overheat Events]
,[Mow Overcurrent Events]
,[Mow Overheat Events]
,[Front Wheel Dropoff Events]
,[Front Wheel Slippage Events]
,[No Wire Signal Events]
,[Battery Temperature]
,[Mow Left Temperature]
,[Mow Right Temperature]
,[Mow Left Current]
,[Mow Right Current]
,[Mow Left Speed]
,[Mow Right Speed]
,[Drive Left Current]
,[Drive Right Current]
,[Bumper Front Events]
,[Bumper Left]
,[Bumper Right]
,[Front Wheel Dropoff]
,[Handle Average]
,[Tilt Vertical Angle]
,[Tilt Horizontal Angle]
,[Wire Left In]
,[Wire Right In]
,[Wire Left Out]
,[Wire Right Out]
,[Edge Distance]
,[Operation Battery Capacity Drawn]
,[Battery Capacity Reset Reason]
,[Operation Battery Capacity Start]
,[Operation Battery Capacity Stop]
,[Active Zone]
,[Area Zone Main]
,[Area Zone A]
,[Area Zone B]
,[Area Subzone 1]
,[Area Subzone 2]
,[Area Subzone 3]
,[Area Subzone 4]
,[Program Disable Reason]
,[Program During Inactive Time]
,[Mow Cycle Time Interval Zone Main]
,[Mow Cycle Time Interval Zone A]
,[Mow Cycle Time Interval Zone B]
,[Mow Time Zone Main]
,[Mow Time Zone A]
,[Mow Time Zone B]
,[Mow Time Subzone 1]
,[Mow Time Subzone 2]
,[Mow Time Subzone 3]
,[Mow Time Subzone 4]
,[Mow Cycle Time Zone Main]
,[Mow Cycle Time Zone A]
,[Mow Cycle Time Zone B]
,[Mow Time Complete Zone Main And Subzones]
,[Mow Time Complete Zone Main]
,[Mow Time Complete Zone A]
,[Mow Time Complete Zone B]
,[Mow Time Complete Subzone 1]
,[Mow Time Complete Subzone 2]
,[Mow Time Complete Subzone 3]
,[Mow Time Complete Subzone 4]
,[Mow Cycle Time Complete Zone Main]
,[Mow Cycle Time Complete Zone A]
,[Mow Cycle Time Complete Zone B]
,[Mow Cycle Complete Zone Main]
,[Mow Cycle Complete Zone A]
,[Mow Cycle Complete Zone B]
,[Base Enable Zone Active]
,[Base Enable Zone Main]
,[Base Enable Zone A]
,[Base Enable Zone B]
,[Edge Enable Zone Main]
,[Edge Enable Zone A]
,[Edge Enable Zone B]
,[Program Inactive Days]
,[Program Inactive Hours 1 Enable]
,[Program Inactive Hours 1 From]
,[Program Inactive Hours 1 To]
,[Program Inactive Hours 2 Enable]
,[Program Inactive Hours 2 From]
,[Program Inactive Hours 2 To]
,[Program Intensity Zone Main]
,[Program Intensity Zone A]
,[Program Intensity Zone B]
,[Program Intensity Subzone 1]
,[Program Intensity Subzone 2]
,[Program Intensity Subzone 3]
,[Program Intensity Subzone 4]
,[Child Lock Enable]
,[Anti Theft Enable]
,[Eco Mode Enable]
,[Mow RPM Normal Mode]
,[Mow RPM Eco Mode]
,[Humidity Operation Stop]
,[Humidity Base Depart Disable]
,[Humidity]
,[Edge Near Wire Track Max]
,[Edge Near Wire Track]
,[Edge Follow Near Wire Amplitude]
,[Robot Work Time Total]
,[Entry Point Distance Subzone 1]
,[Entry Point Distance Subzone 2]
,[Entry Point Distance Subzone 3]
,[Entry Point Distance Subzone 4]
,[Charge Stage 1 Cell Volt Min]
,[Charge Stage 3 Cell Volt Min]
,[Charge Cell Number Volt Min]
,[Operation Start From Base]
,[Miscellaneous 1]
,[Miscellaneous 2]
,[Operation Status Id]
,[Robot Operation Data Analyzer Version]
,[Comments]
,[Qc Defect Number]
,[Battery Low Current Calibration]
,[Battery High Current Calibration]
,[Scan Leg Total]
,[Scan In Motion Leg]
,[Scan In Motion Leg Fail]
,[Turn In Motion Enable]
,[Wire Linear Amplitude Max Learn]
,[Scan In Motion Tangent Distance]
,[Wire Linear Amplitude Max User]
,[Battery Cell 1 Volt Operation Stop]
,[Battery Cell 2 Volt Operation Stop]
,[Battery Cell 3 Volt Operation Stop]
,[Battery Cell 4 Volt Operation Stop]
,[Battery Cell 5 Volt Operation Stop]
,[Battery Cell 6 Volt Operation Stop]
,[Battery Cell 7 Volt Operation Stop]
,[Battery Cell 8 Volt Operation Stop]
,[Battery Cell 1 Volt Operation Start]
,[Battery Cell 2 Volt Operation Start]
,[Battery Cell 3 Volt Operation Start]
,[Battery Cell 4 Volt Operation Start]
,[Battery Cell 5 Volt Operation Start]
,[Battery Cell 6 Volt Operation Start]
,[Battery Cell 7 Volt Operation Start]
,[Battery Cell 8 Volt Operation Start]
,[Battery Cycle Number]
,[Charge Problem Reason]
,[Charge Battery Cell Volt Balance Time]
,[GSM Sim Card ID]
,[Drive Overcurrent Motor Speed Events]
,[Base Depart Disable Reasons]
,[Edge Quarter]
,[Charge Force Battery Full Reason]
,[Scan In Motion Leg Wire Out]
,[Edge Time]
,[Edge Mow Time]
,[Program Mow Time Required]
,[Perimeter Island Enable]
,[Humidity Enable]
,[Humidity Sensitivity]
,[Anti Theft Password]
,[Perimeter Board Version]
,[Edge Near Wire Enable]
,[Edge Near Wire Track Max Zone Main]
,[Edge Near Wire Track Max Zone A]
,[Edge Near Wire Track Max Zone B]
,[Edge Near Wire Track Max Sub Zone 1]
,[Edge Near Wire Track Max Sub Zone 2]
,[Edge Near Wire Track Max Sub Zone 3]
,[Edge Near Wire Track Max Sub Zone 4]
,[Mobile Device App In Use]
,[Edge GoTo Entry Point Time]
,[Operation Mow Start Time]
,[Operation Halt Time]
,[Operation Stop State]
,[Charge Stage 1 Battery Capacity Start]
,[Battery Base Depart Enable Time]
,[Edge Distance Accumulate]
,[Base Signal Valid]
,[Edge Follow Near Wire Base Signal Detect Count]
,[Edge Follow Near Wire End Reason]
,[Edge End Reason]
,[Program Turbo Mow Enable]
,[Wire Out Event]
,[Operation Stop Event Number 1]
,[Operation Stop Event Number 2]
,[Operation Stop Event Number 3]
,[Operation Stop Event Number 4]
,[Operation Stop Event Number 5]
,[Operation Stop Event Number 6]
,[Operation Stop Event Number 7]
,[Operation Stop Event Number 8]
,[Operation Stop Event Number 9]
,[Operation Stop Event Number 10]
,[Operation Stop Event Count 1]
,[Operation Stop Event Count 2]
,[Operation Stop Event Count 3]
,[Operation Stop Event Count 4]
,[Operation Stop Event Count 5]
,[Operation Stop Event Count 6]
,[Operation Stop Event Count 7]
,[Operation Stop Event Count 8]
,[Operation Stop Event Count 9]
,[Operation Stop Event Count 10]
,[Operation Stop Event Date 1]
,[Operation Stop Event Date 2]
,[Operation Stop Event Date 3]
,[Operation Stop Event Date 4]
,[Operation Stop Event Date 5]
,[Operation Stop Event Date 6]
,[Operation Stop Event Date 7]
,[Operation Stop Event Date 8]
,[Operation Stop Event Date 9]
,[Operation Stop Event Date 10]
,[Operation Stop Event Time 1]
,[Operation Stop Event Time 2]
,[Operation Stop Event Time 3]
,[Operation Stop Event Time 4]
,[Operation Stop Event Time 5]
,[Operation Stop Event Time 6]
,[Operation Stop Event Time 7]
,[Operation Stop Event Time 8]
,[Operation Stop Event Time 9]
,[Operation Stop Event Time 10]
,[Operation Stop Event Type 1]
,[Operation Stop Event Type 2]
,[Operation Stop Event Type 3]
,[Operation Stop Event Type 4]
,[Operation Stop Event Type 5]
,[Operation Stop Event Type 6]
,[Operation Stop Event Type 7]
,[Operation Stop Event Type 8]
,[Operation Stop Event Type 9]
,[Operation Stop Event Type 10]
,[Operation Stop Event Zone 1]
,[Operation Stop Event Zone 2]
,[Operation Stop Event Zone 3]
,[Operation Stop Event Zone 4]
,[Operation Stop Event Zone 5]
,[Operation Stop Event Zone 6]
,[Operation Stop Event Zone 7]
,[Operation Stop Event Zone 8]
,[Operation Stop Event Zone 9]
,[Operation Stop Event Zone 10]
,[Operation Cycle ID]
,[Caller ID]
,[Program Mow Time Required Zone Main]
,[Program Mow Time Required Zone A]
,[Program Mow Time Required Zone B]
,[Program Mow Time Required Sub Zone 1]
,[Program Mow Time Required Sub Zone 2]
,[Program Mow Time Required Sub Zone 3]
,[Program Mow Time Required Sub Zone 4]
,[Scan In Motion Performance Zone Main]
,[Scan In Motion Performance Zone A]
,[Scan In Motion Performance Zone B]
,[Scan In Motion Performance Sub Zone 1]
,[Scan In Motion Performance Sub Zone 2]
,[Scan In Motion Performance Sub Zone 3]
,[Scan In Motion Performance Sub Zone 4]
,[Charge Stage 1 Start Date]
,[Shelter Enable]
,[Humidity Shelter Detect Time]
,[Power Supply Voltage]
,[Power Supply Voltage Max]
Diese können einfach per SQL ausgelesen werden. Genau Infos poste ich jetzt nicht, da ich nicht weiß ob das in diesem Forum gewünscht ist. (Vom Hersteller sicherlich auch nicht)
Ich könnte mir auch vorstellen das man mit einem Handy das als Gateway dient eine Anbindung gut hinbekommen könnte. Diese Funktion gibt es ja schon mit der Robomow Toolbox.
Leider bin ich nicht gut genug im Programmieren um eine Anbindung Umzusetzen. Findet sich jemand der das kann? Die Protokolle stellen sicherlich kein Problem da… 
Hi Joachim,
das mit dem „Handy das als Gateway“ zum Toolkit geht, ist aber aber doof, du musst hin und her rennen, um die Verbindung zu bestätigen…
Hatte mal mein EierPhone mitfahren lassen, und die Daten im Toolkit am Büro-PC angezeigt, zu mehr bin ich aber nicht mehr gekommen.Mir wäre es lieber, die RS232 direkt im eigenen Netz zu lassen, Leider habe ich da noch keine Zeit gefunden, weiter zu machen…
Vielleicht kann man sich mal in Zukunft Aufgaben teilen, mal sehen…
…
Hi,
ich habe einen RS622 und würde den auch gerne in IPS einbinden. Für mich wäre es wichtig folgende Dinge zu steuern:
- Zeitsteuerung ausschalten (das was man an dem Knopf an der „Zentrale“ macht) - z.B. bei Regen
- Erkennen wenn der Mäher unterwegs ist und eine Benachrichtigung wenn er nach xx Minuten nicht wieder daheim ist (dann ist er evtl. stecken geblieben)
- Kabelbruch
Meine Idee für 2. wäre z.B. einfach einen Fenstersensor am Robomow zu befestigen und dann sollte man ja sehen wann er geht und kommt.
Eine andere Idee und da bin ich nicht sicher wie ich das sinnvoll (z.B. mit Homematic) mache wäre die LEDs abzugreifen, da die ja leuchten wenn er unterwegs ist - eben könnte man ja über einer „Schalter“ den Tastendruck simulieren und somit den „Timer“ ein und ausschalten.
Die Frage ist, wie ich erkennen kann ob die LED’s an sind … da habe ich noch keine Idee in Bezug auf Homematic.
Die Dinge sind wirklich basic, aber evtl. umsetzbar.
Wie findet ihr sie? Ist es BS oder sinnvoll
Zu 2,
habe ich mit einer „zwave Steckdose mit Messfunktion“ (Watt) gelöst.
Anhand der Leistung kann ich sehen, ob er mäht, in der Ladestation ist (Standby oder laden). Somit kann ich auch über die Zeit erkennen, ob er feststeckt (was hier leider öfter passiert, da einige Wühlmäuse so grosse Löcher gebuddelt haben, das dass Vorderrad stecken bleibt(im Boden versinkt…)
das ist auch ein sehr spannender Ansatz. Wenn man den Kreis ausschaltet (z.B. bei Regen) dann sollte er ja auch nicht mehr fahren?
Was denkst du mit den LEDs …? Denkst du sowas würde Sinn machen?
das könnte auch spannend sein: Robomow mit homematic steuern MC 300 mit Homematic
Mit den LED’S und Tastern würde was gehen, aber da greife ich noch nicht ein, auch wenn es einfach wäre (aber die Garantie hindert mich.:D)
Und nein, Steckdose ausschalten ist nicht, dann fährt Robi aus der „Garage“ !
In die Hardware greife ich erst rein, wenn die Garantie abgelaufen ist…(Also, in 2 Jahren…:eek:)
Software, da ist dann etwas anders…:D.
Über die rs232 Schnittstelle kannst du meiner Meinung nach alles machen. Das Protokoll ist recht einfach. Die Frage ist eher wie man diese per Funk zum IPS bekommt.
Wenn Ihr ein GSM Modul habt und nur wissen woll ob er Steckengeblieben ist, bzw den Status wissen wollt, dann ist es möglich diesen per SQL direkt per Robomow (SQL Server) abzufragen…
Ihr macht echt krasse Sachen. Grundsätzlich geht das aber in die Richtung, über die ich nachdenke.
Eigentlich suche ich nur nach einer Möglichkeit, abzufragen, wenn der Robomow losfährt und wenn er zur Ladestation zurückkehrt, da ich dann ein Rolltor an seiner Mowergarage öffnen/schließen will. Am einfachsten wäre es vermutlich, das laute Piepsignal auszuwerten und damit ein Funksignal zum Öffnen des Garagentors auszulösen. Vielleicht reicht da schon ein einfacher „Clapper“, wie z.B. der hier.
Die Möglichkeit, die per GSM Modul auf den Server übermittelten Daten auszulesen und so in den Home Automation Infoscreen einzubinden finde ich auch spannend. Wenn mistljo die Infos hierzu mal schreiben könnte (ggf. auch per PM), würde ich das mal angehen. Sollte mit PHP & MySQL unproblematisch sein.
Der server ist „leider“ ein MSSql server. Soweit ich das bis jetzt sehe gibt es keine Möglichkeit diesen mit ips (Linux) abzufragen.
Ich habe kein GSM Modul an meinem RS630, da wäre es mal spannend zu Wissen, was da rübergeht.
Das doofe ist, mein RS muss arbeiten. Ich komme einfach zeitlich nicht zum probieren.
Das GSM Modul gegen ein Wlan(oder…) austauschen, und die Daten „umbiegen“ wäre ein Traum.