Das läuft jetzt hier, Daten bekomme ich per Textpraser ins IPS. Der ESP32 ist aber im Moment noch in der Robi Garage verbaut, um erstmal Daten zu sammeln, und ich warte auf weiter Bauteile (GPS Modul und DC-DC Wandler) Dan werde ich wohl noch einen neuen Akku brauchen, laden dauert zu lange(Ist jetzt 5 Jahre im Einsatz und war beim Kauf damals tiefendladen).
Hallo, für alle, die den Toolkit noch benötigen. Möchte hier hinzufügen, dass der Download vom Toolkit noch immer funktioniert. Man muss nur noch direkt setup.exe hinzufügen: (https://sw.robomow.com/software/PC%20Applications/Robomow%20Toolkit/Setup/setup.exe)
1 „Gefällt mir“
Benutzt einen Decompiler auf PC Applications\Robomow Toolkit\Setup\Application Files\Robomow Toolkit (beta)_2_0_0_256\Robomow Toolkit (beta).exe.deploy , und es wird sich zeigen, dass die Passwörter 2312 und 6654 sind.
Entschuldigung für das plötzliche Einspringen – ich dachte nur, dass ich vielleicht nicht der Einzige bin, der im Netz nach dieser Antwort gesucht und dieses Forum gefunden hat.
Hallo, mittlerweile funktioniert dier Link leider nicht mehr. Hast du noch eine alternative Download-Möglichkeit? Mein RS 635 zickt beim Laden mit einem neuen Akku rum, ich würde gerne genauere Infos über den Ladeprozess erhalten. Danke für deine Hilfe!
Viele Grüeß
Magnus
@magnus1
Bist du schon fündig geworden? Kann dir das Tool auch zur Verfügung stellen.
Gibt’s eigentlich gesicherte Informationen zum Datenaustausch mit dem Robi? So wie ich das verstehe war es ja noch nicht ganz klar bzgl. Checksumme und/oder genauen Anzahl an Bytes in einem Telegramm, oder?
Hallo, nein, ich habe noch nichts gefunden. Ich wäre dir sehr dankbar, wenn du es mir zur Verfügung stellen könntest.
Hi Thomas,
ich habe im Roboter-Forum gelesen, dass du Mähspitzel in Symcon integriert hast. Kannst Du mir dazu was schicken? Befehle oder den Parser? Lieben Dank.
René
Du musst nur MowQTT von SteWers auf den ESP bringen und die Daten an den Symcon MQTT senden lassen.
Sieht bei mir so aus :
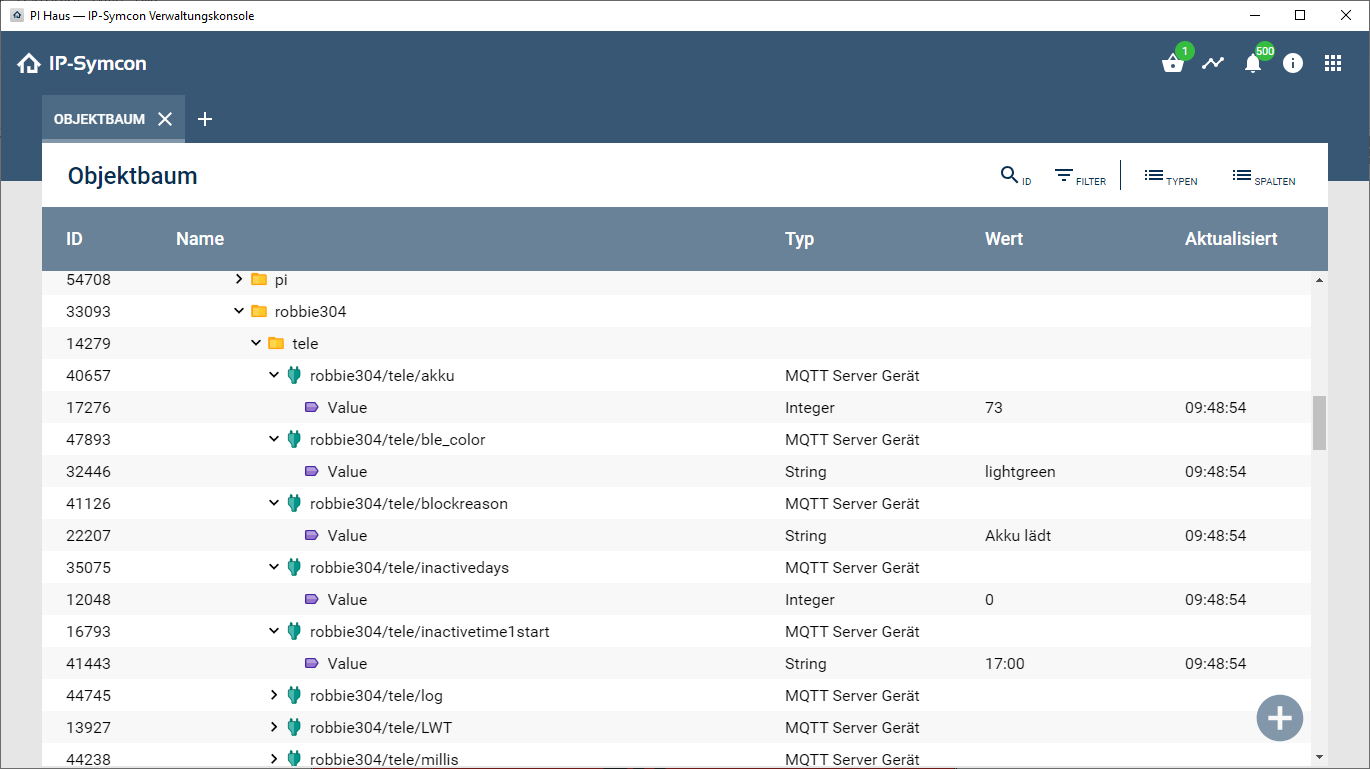
Rest steht im Roboter-Forum.
Danke probier ich mal aus…
Berichte mal, ob es bei dir dann auch läuft.
Leider nicht… wenn ich im Socket die IP Adresse vom mspitzel eingebe und als Port die 1883 bekomme ich Verbindung abgelehnt. Muss ich noch irgendwas in mspitzel aktivieren? Ich nutze dazu den MQTT Client Konfi.
Danke.
Gruß
René
Du musst in IPS der Server Socket anlegen mit Port 1883.
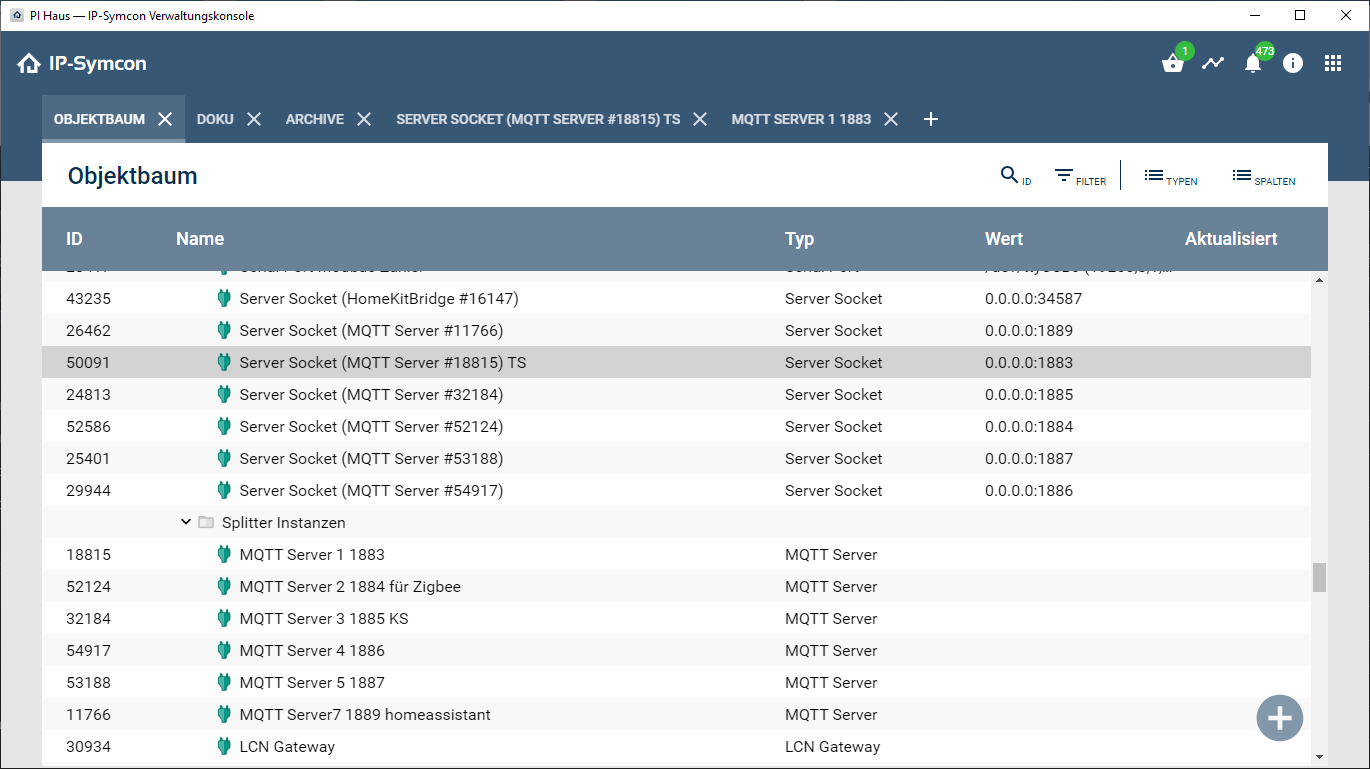
0.0.0.0:1883
MQTT Client Konf geht da nicht.
Sorry… leider zu wenig Erfahrung.
Ich habe jetzt die Server Instanz konfiguriert. Port 1883

Benutzername und PW leer.
Es werden leider keine Instanzen empfangen. Muss ich bei MowQTT noch etwas einstellen.
Vielen Dank für Deine Geduld…
Versuch das mal über den mqtt Konfigurator
Hallo Problem gefunden… Ich hatte übersehen, dass der Host per http Befehl gesetzt werden muss. Jetzt kann ich die Instanzen sehen. Besteht auch die Möglichkeit der Steuerung? Ein Beispiel wird zwar genannt, aber gibt es eine Befehlsreferenz?
Danke.
Steuerung habe ich :
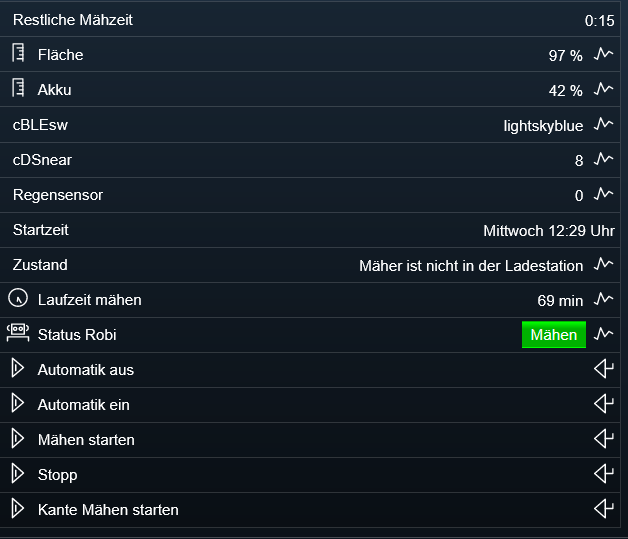
z.B.
<?php
// Automatik aus
file_get_contents("http://User:Password@10.50.10.209/setcmds?50=0");
<?php
// Automatik ein
file_get_contents("http://User:Passwort@10.50.10.209/setcmds?50=1");
usw. Kannst du dir aus der Webseite vom Mähspitzel „klauen“
Die MQTT Beispiele habe ich noch nicht probiert, kommt noch …
Bei meine beiden Robi’s ist der ESP nicht im Robi verbaut.
Mal sehen ob ich nochmal dazu komme, den ESP im Robi einzubauen.
Super … Und danke für die Hilfe.
Hallo zusammen hat jemand ein download für das toolkit ?
Kann ich dir schicken. Hast du Google Drive oder ähnliches?
1 „Gefällt mir“