I re-flashed v1.88 and now robomow works again. ![]()
Also added „spikes“ to wheels, seems working fine!
Could you tell me where I can download Robomow Toolkit?
Thank you for your help!
Yes, could someone please share te latest version of the Robomow Toolkit?
Thanks a lot!
Hallo,
ich bin auf der Suche nach dem Toolkit für den Robomow.
Habe Windows.
Würde mich sehr auf eine Nachricht freuen.
Hi !
Es gab hier in der Vergangenheit einmal eine Initiative, den Robomow in ein LAN/WLAN einzubinden. Hat irgendjemand Kenntnis davon, dass an dem Thema weiter gearbeitet wurde?
a) Falls ja:
Ich wäre für einen Kontakt und Gedankenaustausch dankbar.
b) Falls nein:
Ich hatte vor ca. 1-2 Jahren Kontakt mit „noizy“ (Roland) hier aus dem Forum. Wir haben gemeinsam die Thematik bilateral weiter diskutiert und eine HW- und SW-Lösung skizziert.
Roland steht leider nicht mehr zur Verfügung, ich habe aber mittlerweile sehr viele Details der Datenkommunikation analysieren können und es gibt ein Prototyp-Interface, das an die RS232-SS andockt. Das Ganze ist aber eher noch ein „Proof of Concept“ und es ist noch jede Menge Arbeit zu leisten.
Sofern jemand Expertise in HW-Design (z.B. Platinenlayout mit Eagle, Erstellung von SMD-Platinen, Gehäuse aus 3D-Druckern) und SW (WEMOS/C++) besitzt und Interesse daran hat, das Ganze weiter zu bringen, würde ich mich über eine Kontaktaufnahme freuen.
Mike Knife
Ich wollte auch meinen RS630 per Wlan mal anbinden,
aber aus Zeitgründen und Wlan geht nicht überall im Garten verworfen.
2 Dinge habe ich aber doch gemacht, die alte Powerbox mit einem Wemos bestückt, zum steuern der Tasten, und Abfrage der LED’s .
Eine Wlan Messsteckdose an der Powerbox (so kann ich über die Leistung erkennen, was er macht.)
Alles per Tasmota an IPS gebunden.
Mir reicht das, mehr wäre schön, wird hier aber nicht gehen.
Hallo Thomas,
danke für die Rückmeldung.
WLAN-Verbindung muss nicht notgedrungen immer besetehen. Sinn macht es natürlich, wenn an der Ladestation WLAN-Empfang ist. Das Modul verbindet sich nach Verbindungsabbruch aber immer wieder automatisch neu. So bekommt man wesentliche Infos doch immer wieder.
Realisiert ist derzeit u.a.:
Batt-LadeAnzeige %
Stop-Home-Main/Main-Edge-Subx/SubxEdge
Auto-Main-Auto-Subx
Inaktive Zeiten setzen
Nahe Draht setzen
Insel-Mode
Turbo-Mode
Kanten-Mode
Mähfrequenz
Regensensor
und
rudimentäre Fernsteuerung ohne Mähen
Gruß Mike Knife
Hallo Mike,
dass GSM Modem habe ich an dem RS dran, aber auch das ist verdammt schlecht von den Meldungen hier.
Wlan ist nur in kleinen Teilen vom Garten per Wemos-Nodemcu nutzbar, von daher fehlen mir wichtige Meldungen, wie „stecke fest !“
Das habe ich über die Leistungsmessung der Steckdose lösen können, hat aber 2 Std Nachlaufzeit., sonst klappt es nicht sauber.
Robomow hat da einiges „verschlafen“, aber hier im Garten würde kein anderes Messer unter dem Mäher eine kurze Zeit überleben.(Äste, Tannenzapfen, Nüsse, Äpfel liegen halt auf dem Rasen:D)
Wenn ich mal viel Zeit habe, werde ich mal an der Stelle weiterforschen, aber im Moment nicht.
Aber berichte mal, was wo wie geht.
Wäre es nicht einfacher, dann im Garten an günstiger Stelle einen WLAN-Repeater oder zweiten Access-Point zu installieren?
Ich hab hier einen tp-link router für unter 20 euro im Gartenhaus installiert. OK, dort liegt auch an LAN-Kabel, aber das könnte man dann auch mit einer dlan-Verbindung lösen. So viele Daten laufen da ja auch nicht drüber.
BTW:
Das Messer ist mittlerweile auch das einzig erhaltene Alleinstellungsmerkmal von Robomow geblieben. Wenn es z.B. einen Mower von Worx mit so einem Messer gäbe, hätte ich vermutlich schon gewechselt.
MIke Knife
Hallo Thomas!
Ja, was geht, steht ja in meinem Beitrag.
Hier noch ein Bild von der rudimentären Oberfläche (schon etwas älter),
Da müsste man dann mal einen Profi die Oberfläche designen lassen.

Das Bild ist schon etwas älter. Mittlerweile geht z.B. auch das Einschalten von Insel-Mode.
Es gibt noch viel zu tun, aber manches geht auch Prinzip-bedingt nicht, wenn man nicht an die RM-Dokumentation ran kommt.
So sieht das IF-Modul derzeit aus:
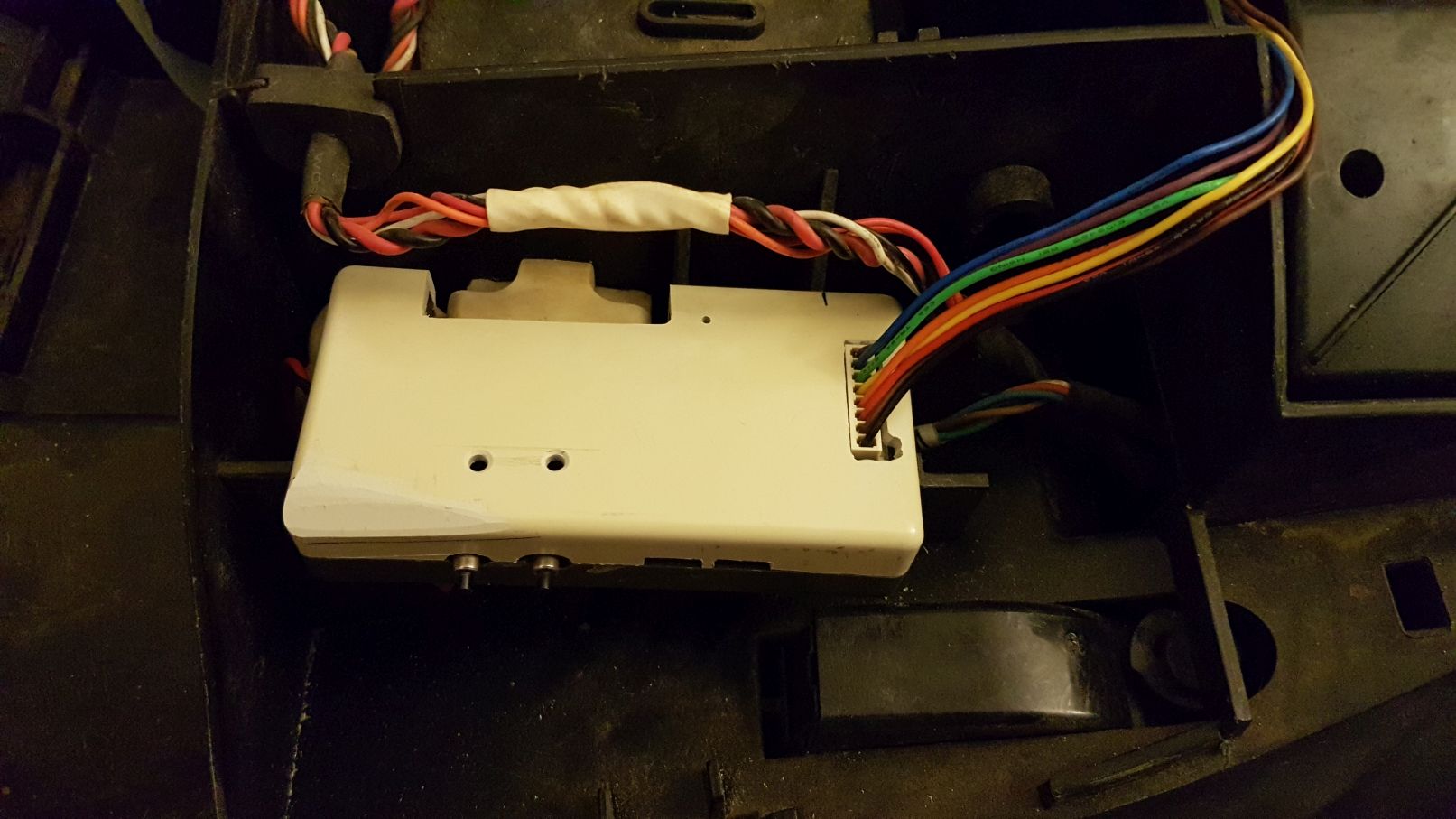
Es passt gerade so unter die Haube.
Wie gesagt: Alles erst einmal „Proof of Concept“!
Gruß
Mike Knife
Hallo Thomas,
ich sehe eben, dass Du wohl einen Robomow-RS hast. Das Interface hier läuft mit einem RC308. Ich bin nicht sicher, ob das mit dem RS genauso funktioniert. Die msgs sind vmtl weitgehend identisch, aber ich nutze zum Start/Verbinden, Stop, Deactivate IF usw. die Tasten vom RC308. Keine Ahnung, ob man das ähnlich auch beim RS realisieren kann.
Die grundsätzliche Steuerung könnte, muss aber nicht genauso funktionieren. Da ich keinen RS habe, kann ich das hier nicht testen.
Gruß
MK
Hallo Mike,
ja, so wird es beim RS nicht gehen, ist halt ein anders Bedienteil.
Aber das sieht ja schon mal gut aus , für die RC Modelle.
Und mit AP im Garten, da komme ich auch nicht richtig gut klar, kann nicht alles abdecken.
Daher habe ich ja einen RS630, der etwas mehr Fläche macht.
Und meine Idee, die Powerbox zu steuern geht nur bei den alten Modellen, die neuen haben ja keine Tasten in der Powerbox mehr.
Mal sehen, was da noch so kommt.
Und Danke für die Info’s 
Hello, I am much less techky then you all but in teh past I was able via the toolkit to update my RC304 firmware. Now it seems that the toolkit is either not communicating anymore to the server (I have the picture of the computer on the top right in red) or it does communicate but thee is no firmware update since mor ethan one year (as I receive an answer back saying that I have the latest firmware). Does any of you know this or have a new toolkit? cheers
PS. also another question you may know the asnwer, under Service menu on the top right there is a box „Smart Mow“ where per sub-zone I can select 0, 1 ,2 ,3 do you know these numbers to what they correspond? thanks again
Hallo Mike,
nachdem die neue App 2.0 nicht mehr manuell mähen kann, suche ich eine Alternative.
Ich habe eure Bemühungen aufmerksam gelesen und wäre an einer Weiterentwicklung durchaus interessiert.
Elektronik- und einfache Programmierkenntnisse bzw. auch PHP ggf. für eine Web App Lösung, PIC Programmierung wären vorhanden.
VG
Björn
Hallo Björn,
sry für die späte Rückmeldung. Ich prüfe leider nicht ständig diese Seite.
Ok, also der Sachstand ist folgernder:
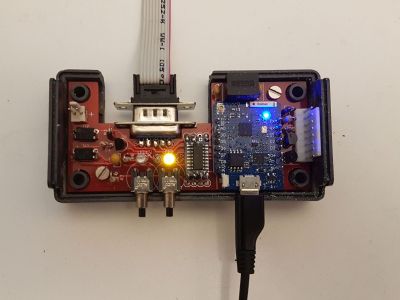
a) Das Interface, um per WLAN Daten mit dem RM (RC-Serie) auszutauschen, ist mehr oder weniger fertig. U.a. habe ich eine Lösung für die professionelle Fertigung einer Platine gefunden (s. Bild). Das ganze läuft mithilfe eines WEMOS D1 mini Pro mittlerweile sehr zuverlässig. Damit sind jetzt alle wesentlichen (aber leider nicht alle) Funktionen vom PC aus steuerbar.
b) Es existieren 2 PC-Programme, um den RM zu steuern. Eins für die Entwicklung mit zusätzlicher Anzeige vieler Daten, die der RM / das Interface zurück sendet, eins mit einfacher Oberfläche für die meisten wichtigen Funktionen. Allerdings ist die Optik nicht schön. Da müsste sich mal ein Profi dran setzen.
Was mir durch den Kopf geht:
-
Eine App fürs Smartphone mit den gleichen Funktionen wie das PC-Programm wäre schön.
-
Die alte App müsste man mal so modifizieren, dass sie nicht updaten will und auch ggf. auch ohne nach Hause Telefonieren mit dem RM verbindet.
Leider habe ich von Handy-App-Entwicklung nicht die geringste Ahnung. Vlt gibts da ja jemanden,der sich qualifiziert und berufen fühlt…
- Und natürlich wäre ein besseres (vmtl gedrucktes) Gehäuse keine schlechte Lösung.
BTW:
Ich habe noch ein kleines altes Tablett mit der alten RM-App. Damit schneide ich die BTLE-Kommunikation mit dem RM mit. Ich kann zwar jetzt schon den RM fernsteuern, aber nicht mit laufendem Messer. Ich werde aber jetzt mal schauen, was da zusätzlich gesendet werden muss… solange ich noch die Möglichkeit mit der alten App habe. Wenn das Tablett mal den Geist aufgeben sollte, sieht es damit dann schlecht aus.
Falls Du glaubst, dass wir da gemeinsam noch weiter kommen könnten, sollten wir uns mal kurz schliessen. Ggf. auch per personal Mail.
Gruß Mike Knife.
1 „Gefällt mir“
Das Toolkit gibt es hier:
ftp://sw.robomow.com:2120/PC Applications/Robomow Toolkit
Benutzer: software_client
Passwort: teststation
Der Link muss lauten:
ftp://sw.robomow.com:2120
Das „PC“ gehört zum Verzeichnisnamen „PC Applications“
Bei den meisten Browsern bleibt das Fenster sonst nach der Anmeldung leer.
MK
Hallo, ehrenwerte Mitglieder des Forums.
Vor kurzem bin ich der Besitzer eines Viking MI 555c, d. H. Robomow RL2000 oder des Leders RL555. Ich habe ein großes Problem, mit dem ich nicht fertig werden kann … Ich habe 22 Seiten Ihres Forums gelesen und bin sehr beeindruckt von Ihrem Wissen. Manchmal verstehe ich nicht, worüber Sie schreiben, aber ich versuche, in Ihre Fußstapfen zu treten. Ich muss den Roboter auf die Werkseinstellungen zurücksetzen, da die Kalibrierung einmalig auf Benutzerebene erfolgt. Die Anwendungen von der Service-Seite werden mit dem Roboter verbunden, nehmen jedoch keine Änderungen vor. Friendly Robotics Motherboard-Version P / N PCG0100C-Verbindungsroboter / RJ12 / Rs232 / USB / PC Vielleicht habe ich etwas durch Löten von RS232-Verbindungen gebrochen … oder ich habe zu neue Anwendungen Dieser Roboter … es gibt viele Fragen und nach einer Woche des Kampfes mit dem Internet : banghead: und der Suche habe ich beschlossen, Ihnen um Hilfe zu schreiben.
Ich zähle auf Ihre Professionalität und die besten Grüße
Jace : O
Hi Jace!
Im Internet scheint es ja nicht viele Informationen zu diesem Modell zu geben.
Um auf Werkseinstellungen zurück zu setzen würde ich mal auf der Fernbedienung C und die beiden Pfeiltasten gleichzeitig (ggf. mehrere Sekunden) drücken. So soll es am RL2000 gehen. Keine Ahnung, ob das bei dem Modell funktioniert, aber es wäre einen Versuch wert.
RS232-Schnittstellen sollten gegen Verpolung, Masse-Schluss usw. immun sein. Bei fehlerhafter Verbindung geht halt nur nichts.
Falls das Gerät baugleich zum Robomow RL2000 sein sollte, würde ich einfach mal den Support von Robomow anrufen. Die helfen recht verlässlich.
Ohne Doku ist weitere Hilfe schwierig.
BTW: Was ist mit „zu neue Anwendungen“ gemeint?
Mike Knife