Hi all,
hat da wer schon mal was versuch, den in IPS zu bekommen ?
Hat eine SUB-D RS232 Schnittstellen, die auch per Robomow Software viel ausspuckt (war mein Wochendkampf, das neue Ding zum laufen zu bringen… ). Mir geht es in erstem Schritt um Akku Daten und Fehlermeldungen.
). Mir geht es in erstem Schritt um Akku Daten und Fehlermeldungen.
Altes Bild von SA :
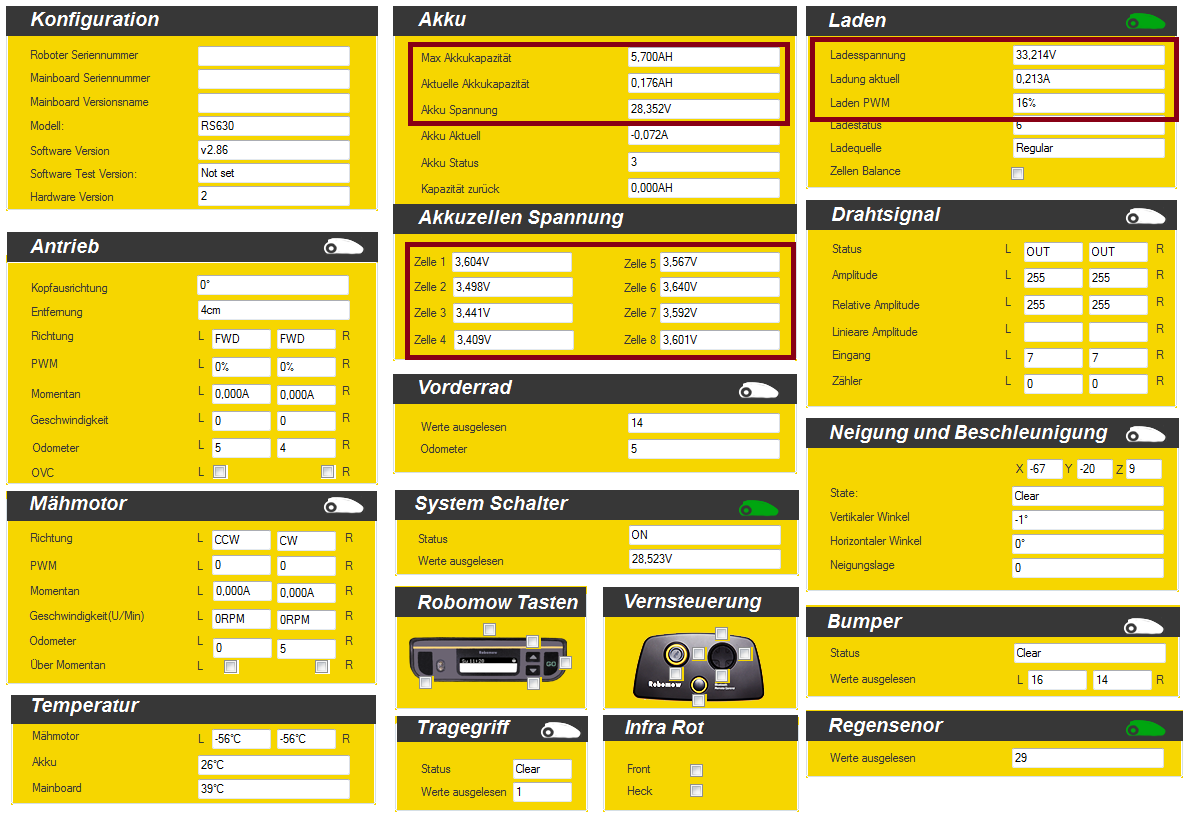
Der schmeißt ja wirklich alles Werte raus…
Da könnte man ja sogar ein Rennen mit fahren 
LG Lutz
Jo, die „Vernsteuerung“ klingt schon spannend…
schau mal hier …
wir sind da schon länger dran … gestaltet sich aber schwierig
Hi wuppi83,
kenne ich, auch wenn nocht nicht alles „verdaut“:D.
Der RS630 ist gerade 4 Tage im Einsatz, und muss erst mal Rasen klein machen, ich muss noch mal min. 200mtr Kabel nachlegen, (450mtr sind gelegt), danach bekommt er eine Testschnittstelle- RS323 auf Funk, wie weiss ich noch nicht, mal sehen was ich so im Bastelkeller finde (Pi3(Wlan), oder WUT Comserver mit Pi, mit eigenem Akkupack oben drauf gelegt). Wenn ich da im Betrieb an Daten komme…
Mist einfach zu wenig Zeit, zum basteln,.
Aber das Ding muss gesteuert werden… (so sehe ich es nach 4 Tagen Ersteinsatz. )
Da ich auch eigene Wettersensorik am LCN und IPS hängen habe, die besser ist, muss ich was tun. Wie, noch keinen Plan…:eek:
Der RS630 wird schon ordentlich gequält, bei meinem Grundstück, so wie es aussieht. Aber er tut erst mal.
Wie sieht es bei Euch mit einem Vollzugrif aus? (Bitte nicht hier posten, wie !)
Jupp, der ist gut. Geht aber,
Einige Dinge sollte man in denglisch lesen, oder dbelgisch, oder dnl lesen, dann findet man mehr.
Moin,
also ich hab ja auch einen Mähroboter (allerdings Gardena / Husqvarna) - seit Ersteinrichtung mäht der jede Nacht dumm aber fleissig vor sich hin. Und nach ein paar Nächten ist der Rasen schön kurz und bleibt dann auch so.
Ich wüsste jetzt gar nicht was ich da so groß steuern / monitoren sollte…
Weil sie es können :D, ich war bisher leider zu geizig und mähe von Hand  .
.
Ja, ich weiß - meine Einstellung ist da manchmal etwas weiblich 
Ich konnte es anfang des Jahres auch nicht abwarten unsere neue Gastherme in´s IPS einzubinden - nun weiß ich gar nicht was ich damit anfangen soll. Sie läuft halt und macht Wasser warm wenn wir es brauchen… :o
ich war bisher leider zu geizig und mähe von Hand
Schenken lassen - ich hab meinen von meiner Frau zum Geburtstag bekommen
Und meine Ölheizung wird nur noch von IPS per GPIO gesteuert, es geht besser als mit der orginal Steuerung.
Zum Robi, ich hätte gerne Akku Zellenspannung, Laufzeit, Regensensor (da der nicht so toll ist, muss ich mir was einfallen lassen !), Fehler wie hänge fest usw …
@Ralf, entweder neuen Trecker oder Robi kaufen, du kennst mein Grundstück:D, dieses mal bin ich das Risiko eingegangen, und habe Robi gekauft.
Garten sieht aus, wie ein Park, Erste Verluste habe ich aber auch, der frisst auch „Baumstümpfe“ weg, was nicht so schön für die Messer ist, Robi hat von SA Abend bis Heute die komplette Rasenfläche klein bekommen, hätte ich so nicht erwartet. Aber ich muss noch am „Draht“ arbeiten…
Ich denke, ich komme auf eine Schleife, nahe 700 mtr, 450mtr sind bis jetzt verlegt.
Ist schon eine Erleichterung, wenn man von der Arbeit kommt, und der Rasen ist kurz, die letzte Zeit musste ich 5-8 Std. am WE im Garten verbringen, da geht einem einfach die Zeit aus (ok, mit Trecker wäre es in 1-2 Std. erledigt, aber beides kostet gleiches Geld beim Neukauf.)
Aber was willst Du denn mit diesen Informationen machen? Das einzig spannende aus der Aufzählung wäre der Hänger, denn da muss man manuell eingreifen. Wenn der Garten nicht komplett einsehbar ist dann ist das sicher hilfreich darüber eine Benachrichtigung zu bekommen.
Aber der Rest: was machst Du mit der Info Zellenspannung, Restlaufzeit, Regen?
Bitte nicht falsch verstehen - ich frage wirklich aus Interesse. 
Hi Thorsten (hocky),
Hänger ist wichtig, aber Akku Zellen auch, da jede einzelne Zelle den Wert per „toolkit“ liefert, da hann man erkennen, ob der Akku ok ist, oder eine Zelle daneben liegt. Laufzeiten am Tag liefert das Ding auch. Regensensor, vergleich zur Wetterstation, da meiner Meinung Robi Sensor so nicht richtig geht. Habe da jetzt etwas Mullbinde aufgeklebt, mal sehen…
Alles in allem bin ich mit dem Mähergebnis des Robomow mehr als zu frieden, nach einer Woche.:eek:
App und FB sind noch „Mist“, oder ich bin zu alt für solche Spiele (ist wie bei einer Video Konsole, dass ist nichts für mich…)
Die RS232 Schnittstelle liefert mit der „toolkit Software“ alles, aber das kann nur der Händler sehen.
Moin Thomas
Wusste garnicht das du jetzt mit Robomow handelst.
Siebo
Moin Thomas,
ok, also finde ich in der Tat alles nicht so richtig spannend außer Hänger.
Wenn der Akku nicht mehr tut dann merke ich das schon und tausche ihn dann aus - Laufzeiten kenne ich, die habe ich ja programmiert
Regensensor braucht man doch auch nicht, meiner mäht bei jedem Wetter.
BTW: Moin, Siebo - Glückwunsch zum ersten Post.
Vergleich Husqvarna Automower 330X (430X ab 2016) mit Robomow RS 630 (RS 635 ab 2016)
Nur zur Info, und hagi hatte mich zu robomow „überredet“, er hatte Recht… (Messer, die mir Ästen und amderm Fallost klar kommen müssen.)
Der Rest, was wie, wo per APP oder IPS ausgewertet werden sollte, muss jeder selbst erkennen,
Ich habe einige Daten im Zugriff, die ich besser gerne sehen würde. Wie Laufzeiten, die sind von der Rasenhöhe abhängig, usw. Ich weiss da geht was viel mehr, muss mal die Zeit finden.
Im Moment ist immer noch Einrichtung angesagt, Kabel an Garten anpassen. Macht doch etwas mehr Arbeit.
Aber die Fläche bei mir sieht schon nach 1,5 Wochen „geil“ aus,
Jetzt noch Laufzeit pro Tag, Aukku in IPS bringen, hätte was (Zeitverlauf zum „sehen“…)
OK, ich sehe schon, Du hast da andere Ambitionen als ich.
Für mich ist ein Mäh-Roboter ein „fire-and-forget“-Device. Einmal eingerichtet tut das Ding halt seinen Dienst und gut is.
Das Ding soll ja meinen Alltag erleichtern und nicht zusätzliche Arbeit verursachen. :o
Ja hocky, ich will mir Arbeit ersparen auf Dauer.
Ein ganz anderes Ding möchte Ralf machen, den Robi starten, wenn keiner zuhause ist, aber nicht von Hand, sondern von IPS über LCN aus.
Mal sehen, was mir noch so zuläuft, an Doku. Einiges habe ich schon, sonst hätte ich Robi mir Firmwarefehler nicht zum rennen bekommen, und auf Reise schicken habe ich keine Lust mehr.
Anhand der Daten könnte man auch noch erkennen, soll er 1x oder 2x die Woche fahren, würde den schon schonen.
Alles in allem, hätte ich nicht gedacht, dass das Teil so gut werkelt. Der Garten sieht aus wie ein Park.
Wenn jetzt der Langzeit Test mit dem Robi klappt, er hält ein paar Jahre durch, bleibe ich dabei. OK, Akku wird bestimmt nicht 3 Jahre überleben, und Messer werde ich wohl auch öfter brauchen:) Aber das Messerproblem hatte ich beim Trecker auch. Wenn ich jede Woche mit dem Trecker gemäht habe, hatte ich ca 1 m³ Rasenschnitt in der Fangbox bzw Kehrmaschine, Mal sehen wie sich das mit mulchen auf Dauer aussieht.
Also nach meinem Verständnis ist so ein Mähroboter dazu gedacht täglich zu fahren. Ist ja auch Teil des Konzeptes: die Abschnitte von den Grashalmen sind dann so klein dass sie schnell verrotten und den Boden düngen -> Stichwort mulchen.
Und damit er tagsüber nicht nervt fährt er bei mir halt nachts. Und das bei jedem Wetter.
Mehr „Intelligenz“ steckt da bei mir nicht drin in der Programmierung - dafür brauch ich kein IPS, das kann der Robbi selber.
Hi hocky,
sehe ich etwas anders:)
Das Ding mach auch mal „Abgleich der Batterie Zellen“, da würde ich gerne mehr Wissen. Täglich fahren, geht auf Lebensdauer, wenn er nicht muss.Ich lasse den RS630 im Moment 2 x die Woche eine Fläche von ca.2000m² mähen, denke aber ich kann auch mal auf 1x die Woche rüntergehen, Da wäre es nicht schlecht, die Daten zu sammeln, um zu „sehen“,
Da beim RS630 ein GSM Modul direkt angesteckt werden kann, ich aber lieber was per eigenem Funk hätte, werde ich mal da weiter suchen.
Im Moment bin ich noch gut beschäftigt, die vielen Löcher in dem Garten zu zu füllen, Robi findet jedes Loch der vielen Tiere, die unter der Wiese wohnen.
Aber so eine schöne Wiese (Rasen) hatte ich noch nie.
Und mit den richtigen PW’s wirft er noch mehr Werte raus.