Hallo zusammen,
wie kann den LCN-Shutter ab IPS4.2 nutzten, man kann ja keine Parameter außer dem Modul eingeben.
Zuordnung von Relais, Ausgängen oder Zeit ist nicht möglich?
Hallo zusammen,
wie kann den LCN-Shutter ab IPS4.2 nutzten, man kann ja keine Parameter außer dem Modul eingeben.
Zuordnung von Relais, Ausgängen oder Zeit ist nicht möglich?
Du willst die normale LCN Shutter Instanz nutzen.
Die Ansteuerung beim Shutter (Motor) erfolgt über das Modul wenn du einen BS4 hast.
paresy
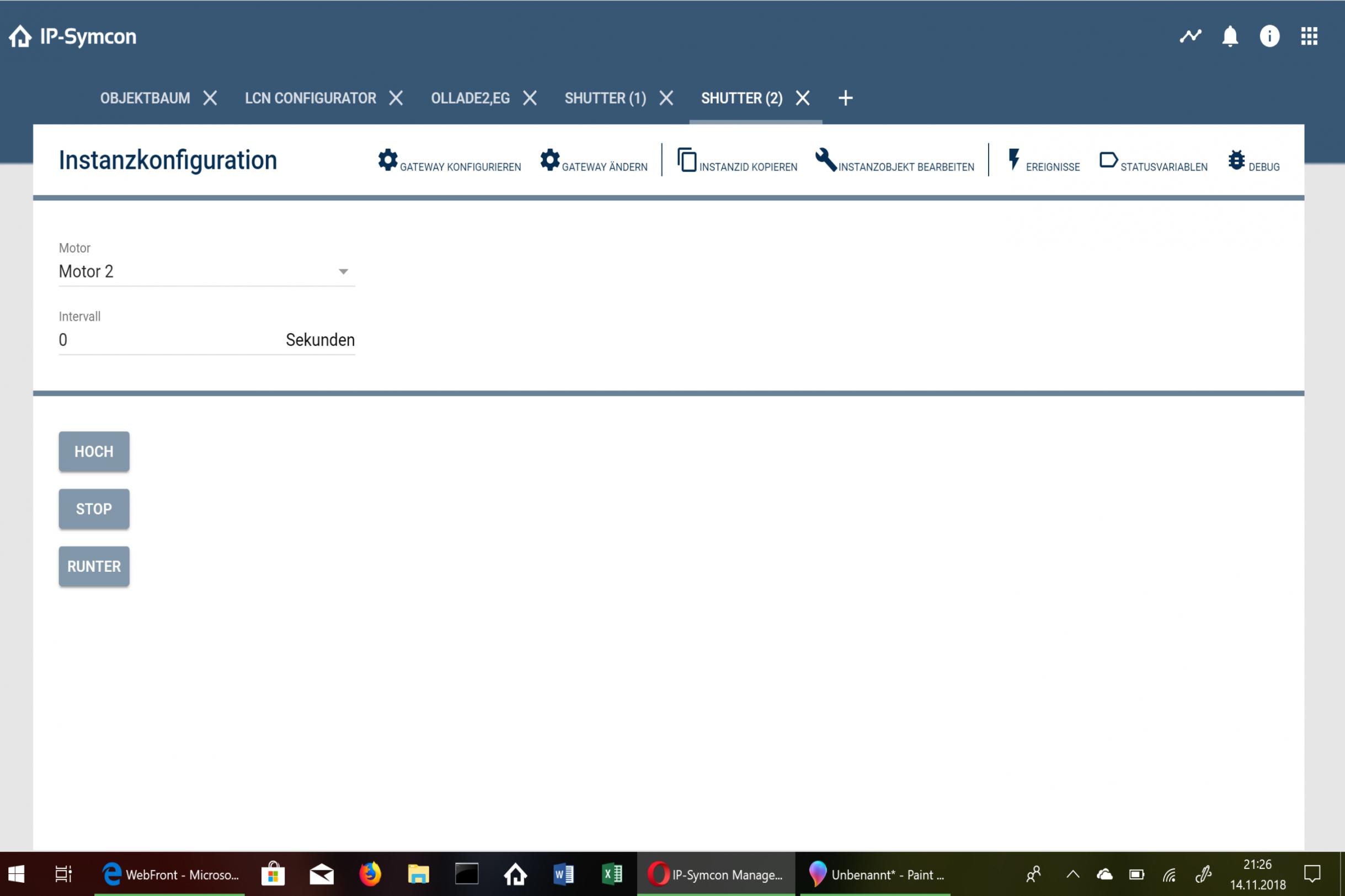
Ok aber wo stelle ein, welchen Motor ich benutzen möchte.
Oh. Ich sehe da ist was mit der Eigenschaftenseite schief gelaufen… Die fehlt :eek:
Fix im nächsten Update.
paresy
Hi Leute!
Habe in Summe 8 Rollos, alle per BS4 positionierbar.
Derzeit in IP-Symcon getestet habe ich es mit 2 Rollos (Motor 1 + 2) auf einem LCN-Modul.
[ul]
[li]Fahrtrichtung falsch[/li][/ul]
Habe in IP-Symcon v4.2 RC5 aber das Problem, dass die Fahrtrichtung verkehrt rum ist.
Wähle ich die Funktion öffnen, dann fährt der Rolladen runter und mit schliessen umgekehrt, dann fährt er hoch.
Stop ist Motor Stop, das passt 
[ul]
[li]Positionsanzeige aktualisiert sich nicht immer[/li][/ul]
Auch die Anzeige der aktuellen Position ist mir ein wenig ein Rätsel.
Bei Motor 1 scheint die Anzeige zu passen und aktualisiert sich dem Intervall gemäß sauber.
Bei Motor 2 aber wird die aktuelle Position nicht immer aktualisiert obwohl die Aktualisierungsanfrage und - antwort retour kommt. Das sehe ich soweit im PCHK-Monitor.
Wenn ich dann aber Motor 1 fahre. Dann wird auch die Position von Motor 2 mit der nächsten Aktualisierungsanfrage wieder korrekt angezeigt.
[ul]
[li]Positionierung mittels Wert?[/li][/ul]
Ist es eigentlich vorgesehen in dem neuen Shutter-Modul aus IP-Symcon heraus das Rollo zu positionieren? Also einzugeben: Fahre auf 50%
Wenn es funktioniert zu sehen wo das Rollo steht, ist das schon super, aber superer wäre es dann natürlich das Rollo auf bestimmte Positionen zu fahren.
Schonmal danke vorab für Antworten und Fehlerkorrekturen.
LG
Richard
Moin tail!
Fahrtrichtung falsch
Schau mal bitte in die PCHK ob bei „Öffnen“ ein Befehl mit R81AU oder R81ZU übergeben wird.
Wenn es AU ist, ist dein Motor wahrscheinlich verkehrt angeschlossen. (Adern vertauscht)
Positionanzeige aktualisiert sich nicht immer
Da möchte ich dich gerne bitte mir einmal das Antwort Telegramm aus der PCHK zukommen zu lassen.
Dann kann ich mal testen wo er da ins stocken gerät.
Positionierung mittels Wert?
Das ist ein Fehler unsererseits. Der Fix würde dann mit eingebaut werden, sodass man übers Webfront dann auch steuern kann.
Grüße
Pio
Hi Pio!
Erstmal danke für deine Rückmeldung.
Fahrtrichtung falsch
Ich habe eine LCN-PCHK Doku (Stand 11.2015), in welcher ich mir die PCK-Befehle für die Motorsteuerung/-positionierung angesehen habe. Wenn diese Doku auch nicht mehr die neuste ist, denke ich, dass diese Befehle sich da nicht geändert haben werden.
Beim Befehl R8Mmaa ist für die Aktion aa beschrieben, dass ZU = Fenster zu / Jalousie hoch bewirkt und AU = Fenster auf / Jalousie runter
Die Beschreibung mit Fenster zu / Fenster auf finde ich ziemlich irreführend, aber Jalousie hoch / Jalousie runter beschreibt es ziemlich eindeutig ;).
Betätige ich in IPSymcon 4.2 RC5 die Funktion Öffnen, dann sehe ich im PCHK Monitor den Befehl R8M2AUF, was meinem Verständnis der PCK-Doku nach Jalousie runter bedeutet. Genau das macht mein Rollo auch.
Ich fürchte also, dass ihr für Öffnen und Schließen die Beiden PCK-Befehle umdrehen müsst.
Als weitere Verifikation, dass die Rollos bei mir richtig rum angeschlossen sind, habe ich aus der LCN Programmiersoftware raus (LCN-Pro 6.3.5) per direktem Kommando an das Zielmodul M61 die Motorsteuerung getestet mit Motor HOCHfahren und Motor RUNTERfahren und meiner Erwartung gemäß ist das Rollo hoch, also raufgefahren oder runtergefahren.
Da man da natürlich auch ein wenig rein-interpretieren kann wie die Richtung da zu deuten ist, habe ich am Freitag noch beim LCN-Support angerufen und habe dort mit einem Support-Mitarbeiter diese Verständisfrage geklärt. Demnach konnte ich so klar verifizieren, dass die Rollos bei mir richtig rum angeschlossen sind. Auf meinen Hinweis hin, dass die Befehle und die Beschreibung in der PCK-Doku irreführend sind, hat er mir zugestimmt.
Positionanzeige aktualisiert sich nicht immer
Ich hoffe du meinst folgenden Auszug aus der PCHK. Wenn du was anderes gemeint hast, dann müsstest mir bitte sagen was genau und wie ich das raus bekommen.Auszug aus der PCHK08:22:56 [PCHK] >M000061.R8M1P1
08:22:56 [PCHK] S000_M004 to M061 Pos. Motor 1/2 Request status
08:22:56 [PCHK] S000_M061 to M004 Pos. Motor 1/2 —
08:22:56 [PCHK] =M000061.RM10000200337403144RM20002200329603156
08:22:56 [PCHK] >M000061.R8M2P1
08:22:57 [PCHK] S000_M004 to M061 Pos. Motor 1/2 Request status
08:22:57 [PCHK] S000_M061 to M004 Pos. Motor 1/2 —
08:22:57 [PCHK] =M000061.RM10000200337403144RM20002200329603156
Interessanterweise ist mir heute aufgefallen, dass alle 30 Sekunden, das ist das Aktualisierungsintervall für die Positionsabfrage, folgende Fehlermeldung in den IP-Symcon Meldungen auftauchen. Die Meldung kommt 2 mal, weil derzeit 2 Rollos eingerichtet sind (Beide am selben LCN-Modul M061; Motor 1 und Motor 2). Man sieht auch in der PCHK Ausgabe das entsprechend 2 Abfragen für 2 verschiedene Motoren gestellt werden.
Positionierung mittels Wert?
Das ist ein Fehler unsererseits. Der Fix würde dann mit eingebaut werden, sodass man übers Webfront dann auch steuern kann.
Super, freu mich schon drauf 
Ich hoffe ich konnte dich mit genug Informationen versorgen, sonst bitte einfach bei mir melden, danke.
Schönen Tag noch
LG
Richard
kann man eigentlich die eigenen Beiträge editieren? Die Funktion hab ich nicht gefunden 
Hatte vorhin die Bilder mit der Fehlermeldung in IP-Symcon nicht dabei.
Hier sind nun 3 Bilder mit folgenden Inhalt:
2 Bilder zeigen die Beiden LCN-Shutter (Motor) Instanzen.
Die, welche nicht ordentlich aktualisiert wird hat die ID 42165. Diese ist es auch, welche in der FlowHandler Fehlermeldung aufscheint.
Man kann anhand vom letzten Aktualisierungszeitpunkt (00:08:49) erkennen, dass die letzte Aktualisierung lange zurück liegt. Sollte sich aber alle 30sek aktualisieren.
Bei der zweiten Instanz mit ID 25157 passts. Hier erkennt man anhand vom Aktualisierungszeitpunkts, dass der Wert auch wirklich aktuell ist.
LG
Richard
Danke für dein Feedback. Ich glaub wir haben einfach die PCK Doku falsch gelesen. Das korrigieren wird. Die anderen Daten sind auch super. Fix kommt somit demnächst!
paresy
Moin!
Fix im nächsten Update!
Dann bitte nochmal auf Herz und Nieren prüfen.
Grüße
Pio
Hallo Leute!
Der LCN_Shutter (Motor) Modul funktioniert schon fast ohne Fehler.
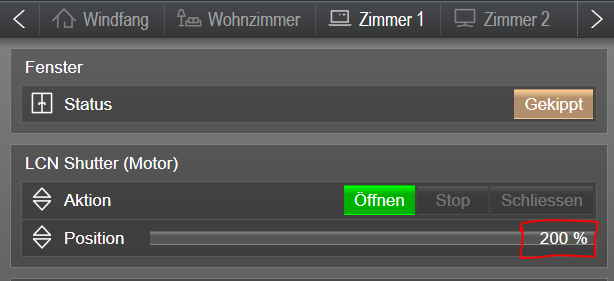
Mir ist jetzt aufgefallen, dass die Rückmeldung zur Motorposition zwar fehlerfrei gelesen wird, aber der Wert wird 1:1 als Position übernommen, was aber nicht stimmt, weil die Rückmeldung nicht in Prozent von 0-100 kommt, sondern im Wertebereich von 0-200.
Sende ich jetzt also z.B.: den Positionierungsbefehl fahre auf 10%, dann fährt das Rollo auch auf 10% was allerdings der LCN internen Position von 20 entspricht. Diese 20 kommen auch als Rückmeldung vom LCN-Bus retour und werden von IP-Symcon wiederrum als 20% interpretiert. Dadurch stimmt die Positionsanzeige nicht.
Ist recht spannend zu sehen wenn das Rollo vollständig geschlossen ist (100% = Position 200) und IP-Symcon zeigt mir das Rollo als 200% geschlossen an
Das bitte noch fixen.
Hierzu folgende Beiden Bilder:
Ps.: Überdrüber wäre natürlich wenn es möglich wäre den Modus auswählen zu können. LCN speichert die Position ja im Wertebereich von 0-200. Das Rollo lässt sich also 0,5% genau positionieren. Es gibt aber 2 PCK-Kommandos um auf Position zu fahren. Mit Angabe im Wertebereich von 0-100 (GO), oder von 0-200 (GP). Rückmeldung der Position kommt aber immer im Wertebereich von 0-200.
Derzeit untersützt IP-Symcon den Wertebereich 0-100, was mir persönlich soweit reicht zum positionieren, weiß aber nicht ob das bei Raffstores vl. notwendig ist wegen der Lamellenposition. Ich hab nur Rollos.
LG
Richard
Danke für die ausführliche Beschreibung! Wir schauen uns das an
paresy
Fix im nächsten Update!
Grüße
Pio
Bei der Instanz LCN-Motor ist noch ein Schönheitsfehler vorhanden.
Bei Action bleibt die Auswahl immer auf Öffnen stehen,
bei der normalen Motor-Instanz wird auch Schliessen angezeigt.
Öffnen/Schliessen sollten über das zweite Relais abgefragt werden und Stop über das erste Relais,
dann wäre die Anzeige richtig.
Da wir die Relaiszuordnung bisher nicht auswerten habe ich fürs erste eingebaut, dass je nach Positionsrichtung Öffnen/Schließen aktiviert wird.
paresy
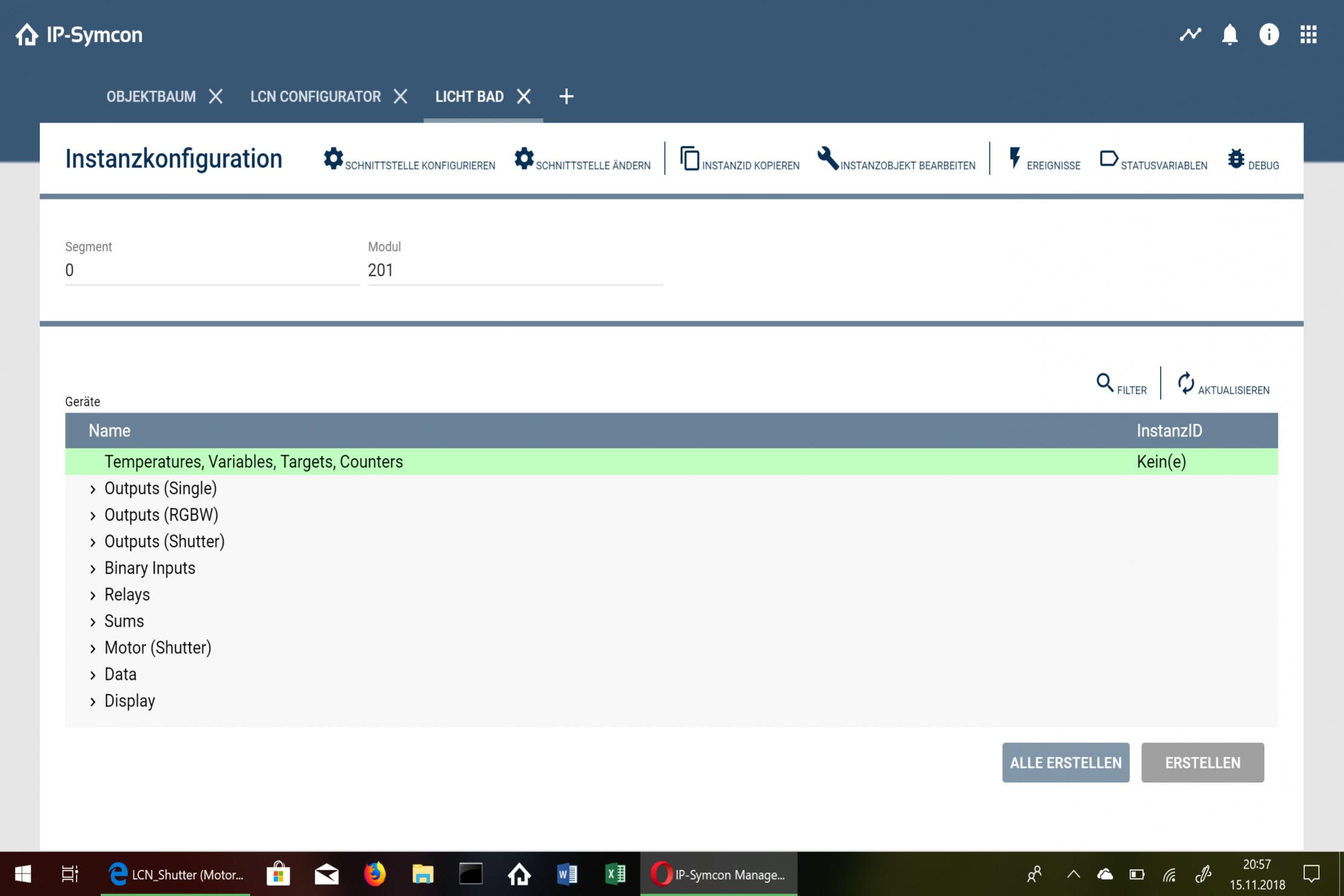
Ich mache gerade meine ersten Versuche mit IPS5.0 /Raspberry Stretch/LCN-PKE. Ausgänge funktionieren schonmal, auch Relais steuern geht. Die Motor(Shutter) Funktion geht aber nicht. siehe Bild. Wenn ich die Relais direkt ansteuere geht´s. Bei Shutter Öffnen/Stopp/Schließen kann ich im Bus-Monitor zwar die Befehle HOCHfahren/RUNTERfahren/Stop angezeigt, die Rolladen bewegen sich aber nicht.
Hat jemand eine Idee?
Hast du die LCN Shutter Instanz verwendet? So wie es aussieht nutzt die LCN Shutter Motor Instanz, welche nur geht, wenn du einen LCN-BS4 nutzt.
paresy
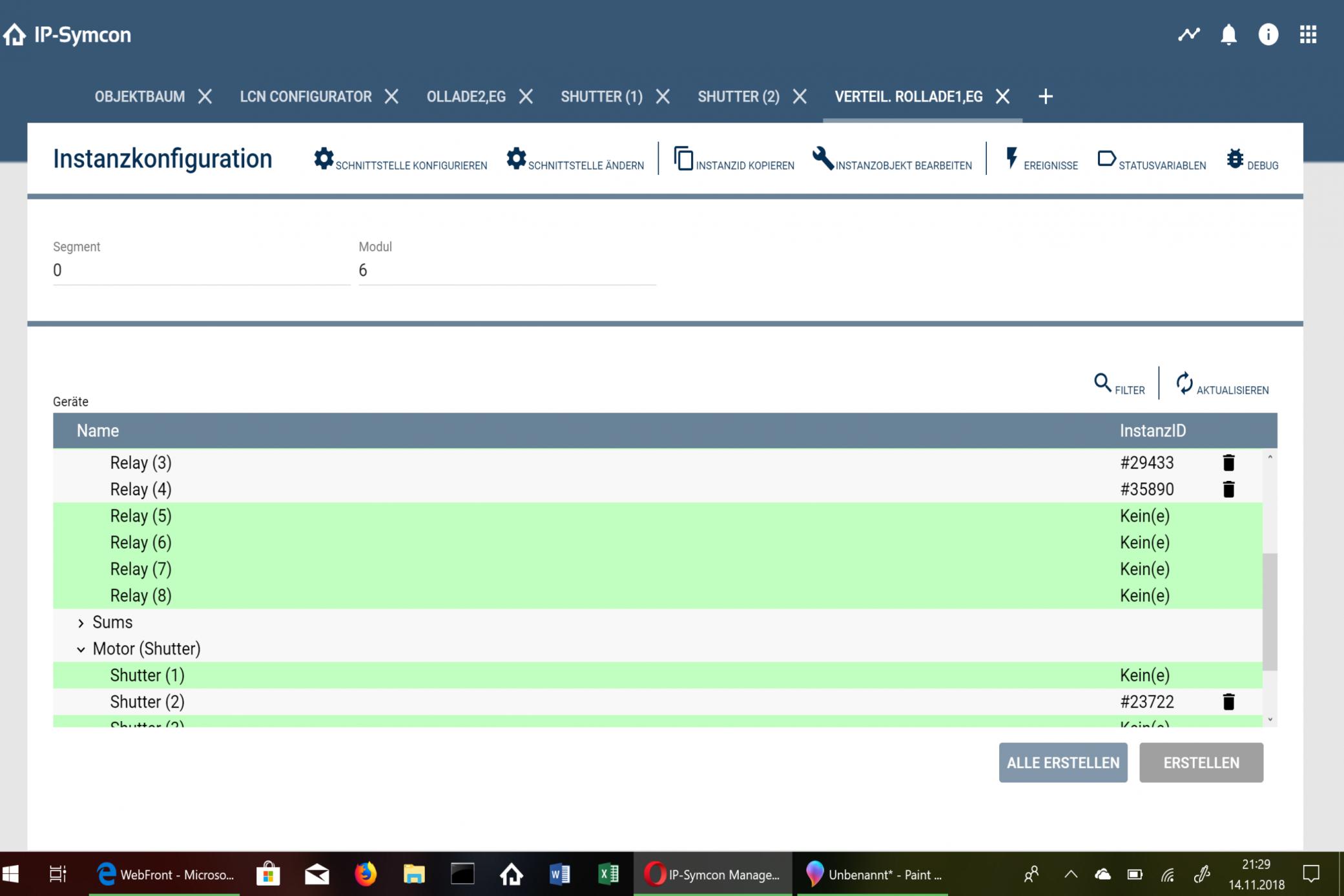
Es funktioniert jetzt. Ich habe die Instanz händisch hinzugefügt. Bei der Konfiguration mit dem LCN Configurator wird der Shutter nicht angeboten, nur der Motor (Shutter) siehe Bild. Das war etwas irritierend.
Danke
Tatsache. Die Shutter, welche über Relais angesteuert werden, sind nicht im Konfigurator drin. Das habe ich zum nächsten Update korrigiert.
paresy