Moin Zusammen,
ich bräuchte mal hilfe. Und zwar ist meine Roomba vor kurzem mal liegen geblieben und hat seit dem keine Daten mehr gesendet. Ich konnte Ihn auch nicht per IPS starten.
Heute kam mir die Idee, das ja eventuell die Bautrate wieder auf den Originalzustand zurück ist, da die Batterie total platt war. Also die CLEANTASTE für 10 Sek gedrückt, Melodie abgewartet und und nochmals gedrückt. Und siehe da… ich kann ich wieder per IPS starten, aber ich kann keine Daten empfangen. Die Registervarible bleibt leer.
Hat jemand eine Idee woran das liegen kann das der kleine nix sendet, ich ihn aber per Skript starten kann?
Bin noch @work aber 128 wird eigentlich nur einmal gesendet zum aktivieren der Kommunikation.
Danach sende ich immer nur „QUERY_LIST“ (149) um die Sensoren abzufragen.
Wenn bei mir der Akku mal raus war , dann per Button Baudrate setzen und per Webfront einmal „Start“
senden. Dann piepst er einmal und gut ist. Gerade gestern hab ich meinen Roomba mehrmals komplett zerlegt.
Hatte einen „Circledance“ und musste an die Bumper.
Wie gesagt, ich hatte vorher keinerlei Probleme. Nur jetzt will der kleine nicht mehr Antworten!!
Das mit dem Startbefehl funktioniert jedenfalls nicht.
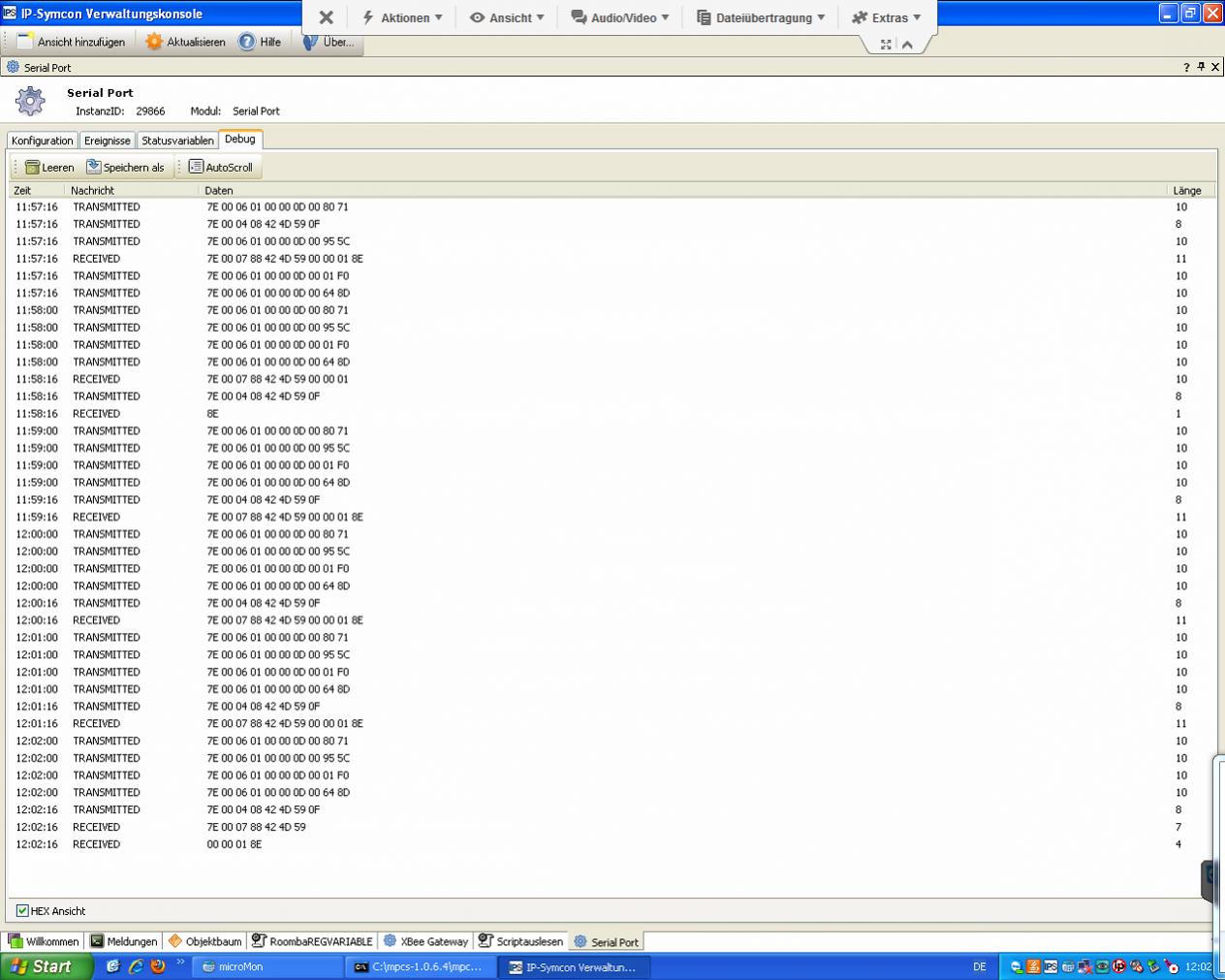
Wenn du checken willst ob die Baudrate stimmt dann den seriellen Port wieder in Textmodus schalten und beim
Ein/Ausschalten des Roombas sollten folgende Meldungen kommen.
So… meiner sendet wieder brav. Ich habe den Akku entfernt, 5 min gewartet, Akku wieder rein. Danach die Bautrate eingestellt und er piepste danach kurz und schickte seine Daten wieder.
Vor dem Batterie entfernen hat das Einstellen der Bautrate keinen Erfolg gehabt.
Danke für die Hilfe und den Anderen hier viel Erfolg….
Moin,
ich wende mich nun auchmal mit meinem Problem an euch. Habe die Einrichtung nach den Tutorials von pinki99 und RWN abgeschlossen, leider bekomme ich keine richtige Rückmeldung in IPS. Dem Roomba Befehle geben kann ich, z.B. kann ich in in den Clean Modus setzen.
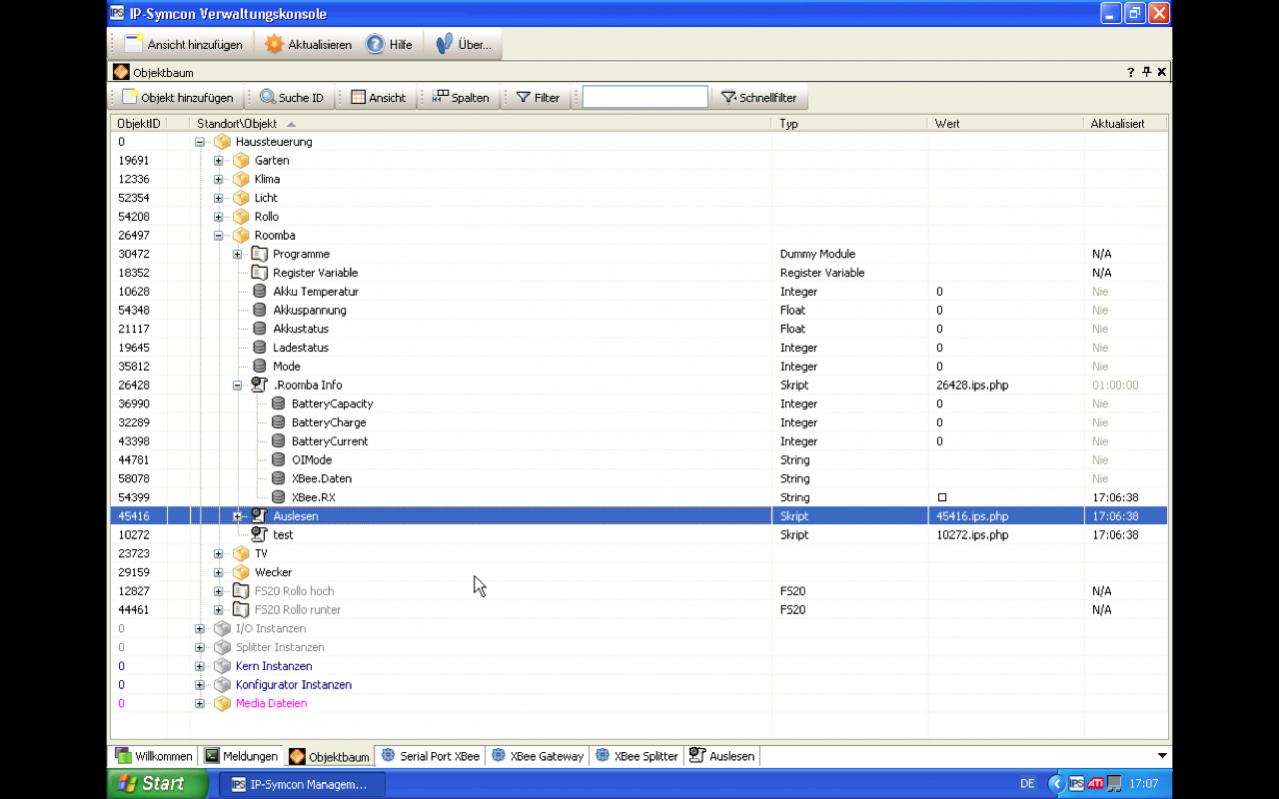
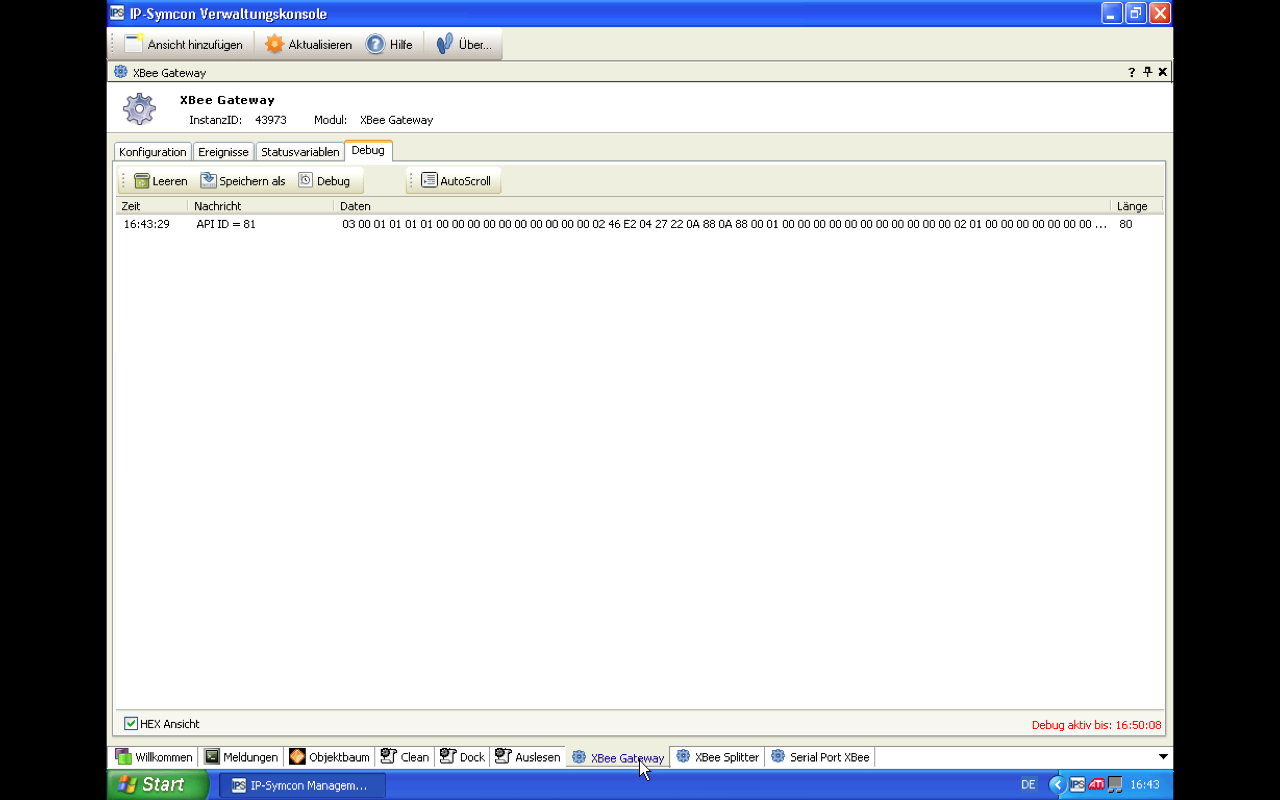
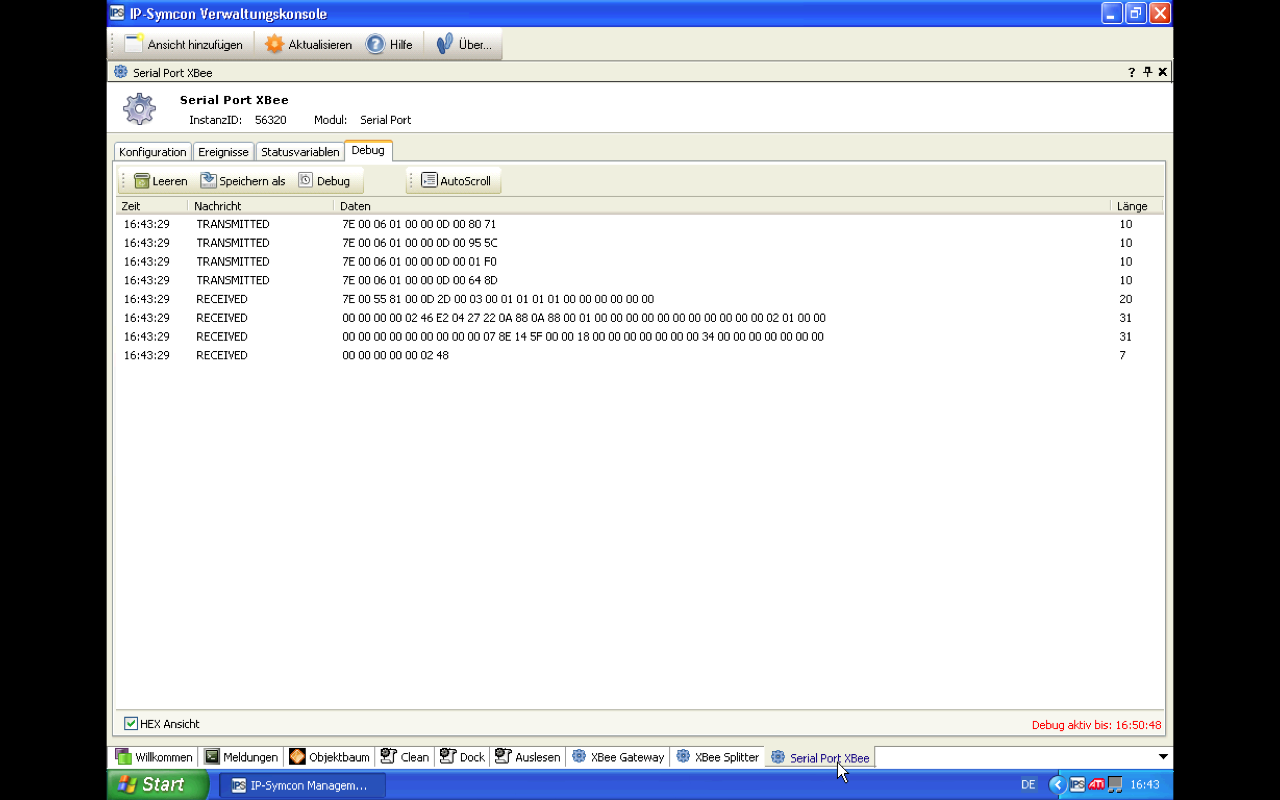
Es wurde schon auf falsche Baudrate getippt, ich habe diese aber in der Systemsteuerung für den Comport, in XTCU für Coordinator und End Device und am Roomba auf 19200 gesetzt. Ich bekomme nun nach etwas basteln auch etwas zurück, allerdings wohl nicht das was ich brauche, es wird nichts in die jeweiligen Variablen geschrieben, der Debug zeigt aber etwas an wenn ich das Auslesen Script sende und auch XBee.RX wird aktualisiert sowie das Script „test“ ausgeführt (getriggert von Registervariable). Ich habe mal ein paar Screenshots angehängt die zeigen,was ich nach dem Ausführen des Auslösen-Scripts so sehe.
Ich nutze die XBee Pro Serie 10/63mW und einen SainSmart XBee USB Adapter. Der Coordinator hat die Adresse 1 und das End Device die Adresse D (->13). Habe ich noch irgendetwas vergessen?
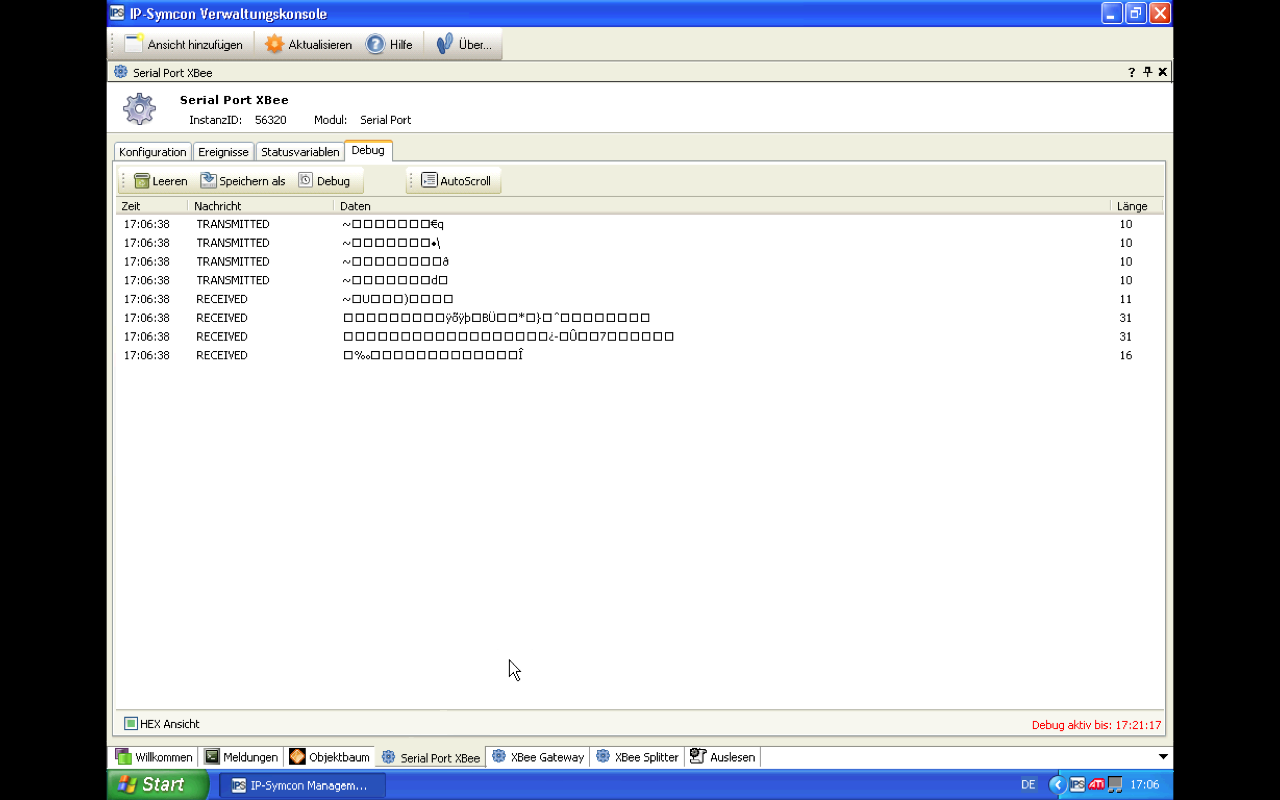
Moin,
habe nun beim Debug mal den Hexmode rausgenommen, es scheint ja definitiv irgendwas zurück zu kommen, aber IPS scheint damit nichts machen zu können, kann damit jemand mehr anfangen?
Moin,
das der Registervariable zugeordnete Script „test“ wird ausgeführt, also scheint da was anzukommen. Die Variable XBee.RX wird auch aktualisiert, dieser Variable ist als Aktion das Script .Roomba Info zugeordnet, dieses wird jedoch nicht ausgeführt. Wenn ich ein Ereignis hinzufüge „bei Variablenaktualisierung von XBee.RX“ wird das Script ausgeführt, die ganzen Statusvariablen bleiben aber trotzdem leer bzw. auf 0.