Hallo Zusammen,
gibt es hier Neuigkeiten? Hab das gerade durch Zufall gefunden. Ich nutze noch so ein altes Robonect Modul was leider kaum funktioniert.
Ein Modul dafür wäre schon ziemlich cool…
Hallo Zusammen,
gibt es hier Neuigkeiten? Hab das gerade durch Zufall gefunden. Ich nutze noch so ein altes Robonect Modul was leider kaum funktioniert.
Ein Modul dafür wäre schon ziemlich cool…
Bin aktuell dabei das Modul zu erstellen. Ich denke ein bisschen Zeit brauche ich noch. Sobald etwas vorliegt würde ich hier informieren und mich über fleißige Tester freuen.
sehr cooooool… da freue ich mich schon!
Im Store gibt’s eine Modul-BETA, wenn man nach ROBONECT sucht… 
Spitze! Endlich gibt es ein Modul für Robonect. Vielen Dank @Coyote ! Werd ich heut gleich mal testen…
cool, ich habe es schon mal installiert, werde morgen mal versuchen zu testen.
Vielen Dank!
Loerdy
Hallo Coyote,
da warst du dann wohl schneller als ich. Mein Modul, das ich angedeutet habe, ist aufgrund anderer Themen, deutlich hinter deinem hinterher.
Daher schwenke ich sehr gerne zum Tester um und würde hier fleißig Feedback geben.
Was ich jetzt gerade schon mal gesehen habe gefällt mir sehr gut.
Planst du auch die Kameraeinbindung?
Was mir aufgefallen ist:
Aktuell polle ich die Daten und nutze noch kein MQTT.
VG
Sönke
Hi Sönke,
Den Status(Klartext) nehme ich aus dem MQTT (abrufen kann man den nicht (wenn jemand weiß wie, immer her damit ;)). Bei mir kommt da oft nichts, weshalb ich es noch nicht angehen konnte. Muss ich mal beobachten.
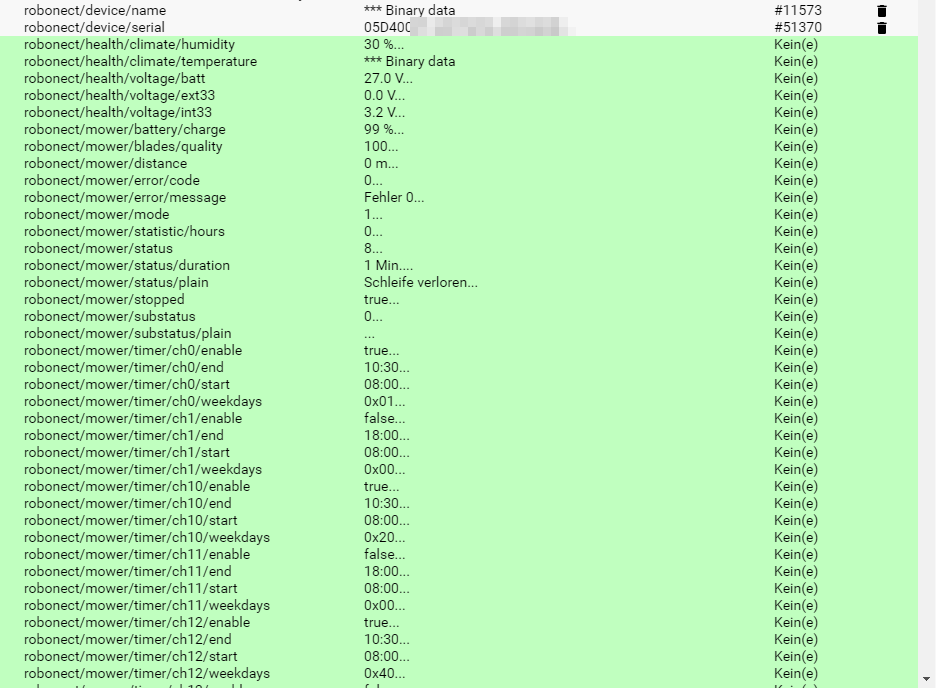
Interne und Externe Spannung zicken bei mir auch. Ggf. habe ich da falsche MQTT Tonics (/health/voltage/int33 bzw. /health/voltage/ext33). Extern habe ich schon mal bekommen, aber intern auch noch nie. Beides zudem „irgendwann“. Generell nehme ich nicht einfach alles, was via MQTT kommt, sondern identifiziere es und ordne es hart vorgegebenen Variablen zu (die ich ja für’s „nur Pollen“ auch brauche).
Die Fehlermeldungen zicken bei mir beim Abrufen. Soll heißen: Ich bekomme oft nichts zurück (auch nicht im Browser) und der Abruf läuft sich tot. Deshalb habe ich es nicht im regelmäßigen Poll eingebaut. Die Meldungen können aber über einen Befehl abgerufen werden. Da möchte ich selbst noch nachbessern, habe aber noch kein verlässliches Muster entdeckt, wann das Abrufen sich lohnt (also der Abruf erfolgreich sein würde).
Die Timer müssen ebenfalls per Befehl gelesen und/oder geschrieben werden. Ich bekomme es leider nicht mit, wenn man den Zeitplan im IPS ändert (hat da jemand eine Idee?). Ich will hier aber noch eine „Aktionsvariable“ einbauen, so dass man dafür Buttons im Webfront hat, um den das Auslesen oder Schreiber der Timer anzustoßen.
Die Kamera selbst habe ich nicht (so groß ist mein Garten auch nicht). Insofern: Wenn mir jemand sagt, wie ich das Bild abrufen kann, würde ich evtl. blind was versuchen.
Gruß
Coyote
Hallo Coyote,
die Spannungen int33 und ext33 kann ich zuverlässig über das Kommando „health“ abrufen:
… cmd= health
Diese Übersicht aus dem Robonect Forum kennst du bestimmt, oder?
https://www.robonect.de/viewtopic.php?f=10&t=2535
Das Bild soll man folgendermaßen abrufen können:
url: http://myrobot/cam.jpg oder http://myrobot/cam.mjpg
Ich würde mich sehr über einen Befehl zum manuellen Abrufen und über einen zusätzlichen Timer mit dem man das Aktualisierungsintervall der Bilder einstellen kann freuen.
Meine Kamera ist noch auf dem Weg aus China hierher, aber ab dann könnte ich testen.
VG
Sönke
Neue Beta:
Update von int33, ext33 und battery voltage nun auch über den regelmäßigen Update (vorher nur MQTT).
Bzgl. der Kamera ist es halt unschön, wenn man das blind machen muss. Aber: Wenn der Link so einfach ist, warum dann nicht direkt in IPS einbinden?
Hallo Coyote,
danke für das Modul, welches bisher ohne Probleme funktioniert  .
.
Gibt es die Möglichkeit einen manuellen Mähauftrag um einen Fernstart (Fernstartpunkt) zu erweitern? Dadurch wären dann eigene Programme mit verschiedenen Fernstartpunkten seitens IPS möglich.
@Coyote Seitdem der Mäher abgeschalten ist kommt im Log alle paar Sekunden
| ScriptEngine | Semaphore Robonect12958_Update für SkriptID 0 wurde nicht korrekt verlassen
Lässt sich das irgendwie deaktivieren? Bis zum Start des Roboters werden wohl nich ein paar Tage vergehen und das Log ist immer arg voll mit dieser Warnung.
Grüße LCNRookie
Updates in der Modul-Konfig abstellen?
Neue Beta Version online. Probier es mal aus (ggf. den Timer anschalten, sichern, und wieder ausschalten).
Bitte um kurzes Feedback. Wenn das geht mache ich aus der Beta mal eine offizielle Version.
Bitte Bitte. Ich werde das Modul jetzt auch aus dem Beta in den Stable-Status erheben 
Das Modul ist jetzt als Stable eingereicht und auch die Beta ist etwas überarbeitet worden.
!Achtung! Anpassungsaufwand!
Unter dem Attribut „Timer-Plan aktiv“ gibt es ein Ereignis „Timer Wochen Plan“. Nach der Aktualisierung der Beta oder Umstieg auf die kommende Stable könnten dort 2 dieser Ereignisse stehen. Das „ältere“ ggf. erkennbar, da nie aktualisiert, muss gelöscht werden, da es nicht mehr vom Modul erkannt wird.
Wenn möglich kann man auch einfach vor der Aktualisierung des Moduls das vorhandene Ereignis löschen (es wir ja die neue Variante angelegt).
Der Wochenplan muss dann (sofern man ihn nutzt) anschließend neu ausgelesen werden.


{kind=link}