Ich habe jetzt noch mal einen Test gemacht und alle 4 Koordinaten als Ecken untereinander getauscht.
Es kommt immer der selbe Fehler.
Der S50 fährt aus die Ladestation raus ca 30cm, dann sagt er mir das er das Zone Clean abgeschlossen hat und fährt sofort wieder in die Ladestation.
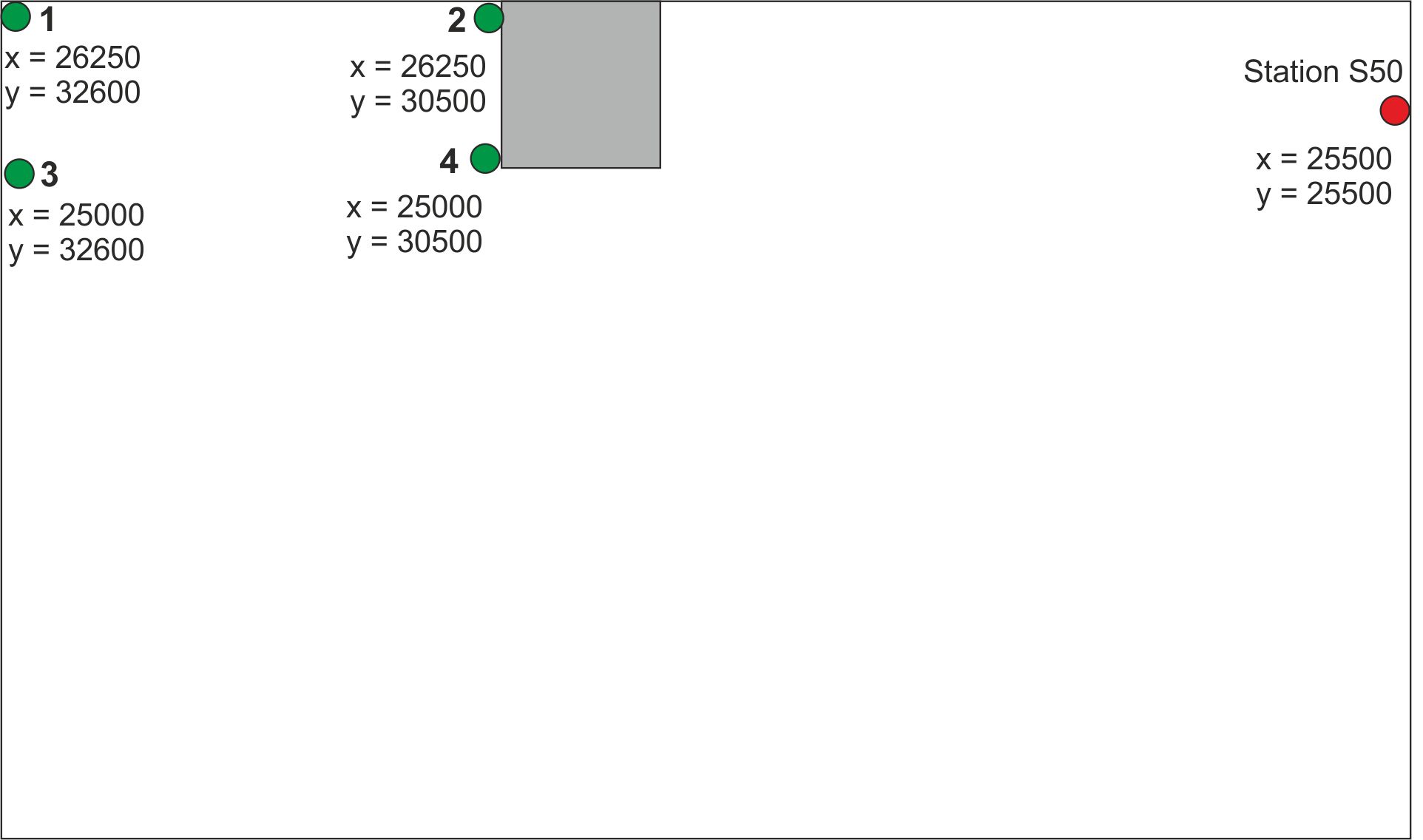
$lower_left_corner_x = 25500; // X-Koordinate der unteren linken Ecke der Zone (Rechteck)
$lower_left_corner_y = 25500; // Y-Koordinate der unteren linken Ecke der Zone (Rechteck)
$upper_right_corner_x = 28000; // X-Koordinate der oberen rechten Ecke der Zone (Rechteck)
$upper_right_corner_y = 28000; // Y-Koordinate der oberen rechten Ecke der Zone (Rechteck)
…die Koordinaten sind per Befehl direkt erreichbar… aber nicht über den Befehl ZoneClean. Er fährt kurz raus und sagt dann: Vorgang abgeschlossen und kehrt zur Basis zurück
Vielleicht irgendein Fehler an der Übermittlung der Daten? Ist ein Roborock (2. Gen) nicht gerootet.
…also scheint die Software die Parameter richtig zu übermitteln, nur nicht umzusetzen. Einer eine Idee? oder bei wem funktioniert es? kann es sein, dass die o.g. Funktion nur bei gerooteten Geräten funktioniert?
Danke für den entscheidenden Hinweis. Da habe ich doch glatt vergessen was aus der Testumgebung im Repository zu ergänzen, deshalb ist mir das leider selber nicht aufgefallen. Die Parameter sind so nämlich falsch, da fehlt noch ein , ich habe das jetzt mal ergänzt. Könnt ihr mal ein Modul Update machen und Rückmeldung geben ob das jetzt eine Besserung bringt und auch auch bei Euch funktioniert ohne das der Sauger gleich wieder zur Ladestation zurück kehrt.
Er hat die Karte komplett neu aufgebaut in der MI-Übersicht aber um 90° gedreht.
Und jetzt stimmen alle ausgemessenen Punkte nicht mehr. X - Y sind alle vertauscht.
Ja klar kann ich als Option einbauen zum ankreuzen, dann werden halt Einzelvariablen angelegt. Ich bin nur immer etwas zurückhaltend nicht zu viele Variablen zu verbrauchen, aber wenn das keine Rolle spielt und man diese dann z.B. in IPSView besser einzeln platzieren kann ist das ja ok.
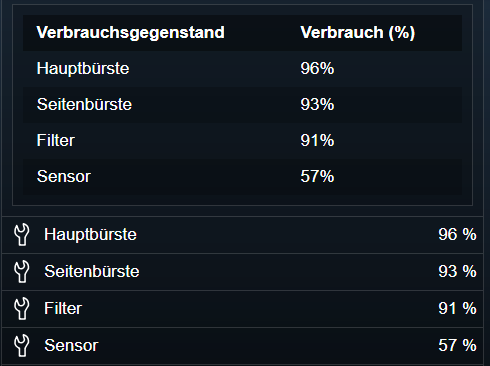
Wenn man nicht die alte Gesamtübersicht der Verbrauchsgegenstände anzeigen lässt. (Weil man die nicht braucht).
Werden die einzel Variable der Verbrauchsgegenstände nicht aktualisiert.
Ja stimmt, ist eine Funktion die aufgerufen wird die dann die Werte schreibt, ich kann mal schauen ob man das noch splitten kann, dann sollte das unabhängig gehen.
Ein Variable die TRUE wird wenn ein Fehler im S50 ansteht.
Eine Variable die TRUE ist wenn der S50 sich im Abfrage Intervall (Zeit) gemeldet hat.Wenn die Variable FALSE wird,
kann man das nutzen um ein Meldung zu erzeugen, S50 Antwortet nicht. (zb. wenn AKKU leer, oder er Ausgeschaltet ist)